


《中国康复理论与实践》 ›› 2021, Vol. 27 ›› Issue (6): 627-636.doi: 10.3969/j.issn.1006-9771.2021.00.002
陆盛1,2,胡冰山1,2( ),程科1,2,喻洪流1,2,倪伟1,2
),程科1,2,喻洪流1,2,倪伟1,2
收稿日期:2020-11-20
修回日期:2020-11-30
出版日期:2021-06-25
发布日期:2021-06-21
通讯作者:
胡冰山
E-mail:hubingshan@usst.edu.cn
作者简介:陆盛(1996-),男,汉族,上海市人,硕士研究生,主要研究方向:康复机器人智能控制|胡冰山(1982-),男,湖北当阳市人,副教授,主要研究方向:康复机器人智能控制。
基金资助:
Sheng LU1,2,Bing-shan HU1,2(),Ke CHENG1,2,Hong-liu YU1,2,Wei NI1,2
Received:2020-11-20
Revised:2020-11-30
Published:2021-06-25
Online:2021-06-21
Contact:
Bing-shan HU
E-mail:hubingshan@usst.edu.cn
Supported by:摘要:
柔顺变刚度驱动机构分为弹性元件、气动元件、电-磁元件和智能材料四大类。变刚度驱动机构正在逐步应用于康复机器人,在上下肢康复机器人中可适应患者的阻抗变化,在外骨骼中可保证穿戴者的安全,在假肢中可提高仿生性。现有康复机器人变刚度驱动机构还存在一些问题,还应具备紧凑的结构、低能耗、良好的刚度特性、高响应速率和渐进式输出扭矩曲线等特点。
中图分类号:
陆盛,胡冰山,程科,喻洪流,倪伟. 康复机器人柔顺变刚度驱动机构研究进展[J]. 《中国康复理论与实践》, 2021, 27(6): 627-636.
Sheng LU,Bing-shan HU,Ke CHENG,Hong-liu YU,Wei NI. Advance in Flexible Variable Stiffness Actuator of Rehabilitation Robot (review)[J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2021, 27(6): 627-636.
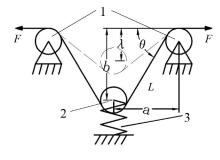
图1
三角形结构弹性元件柔顺变刚度机构原理注:1.定滑轮组;2.动滑轮;3.定刚度弹簧"
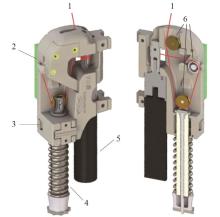
图2
仿生肌骨机器人绳驱动机构[10]注:1.肌腱;2.驱动控制板;3.线性编码器;4.线性压缩弹簧;5.无刷直流电机;6.滑轮组"
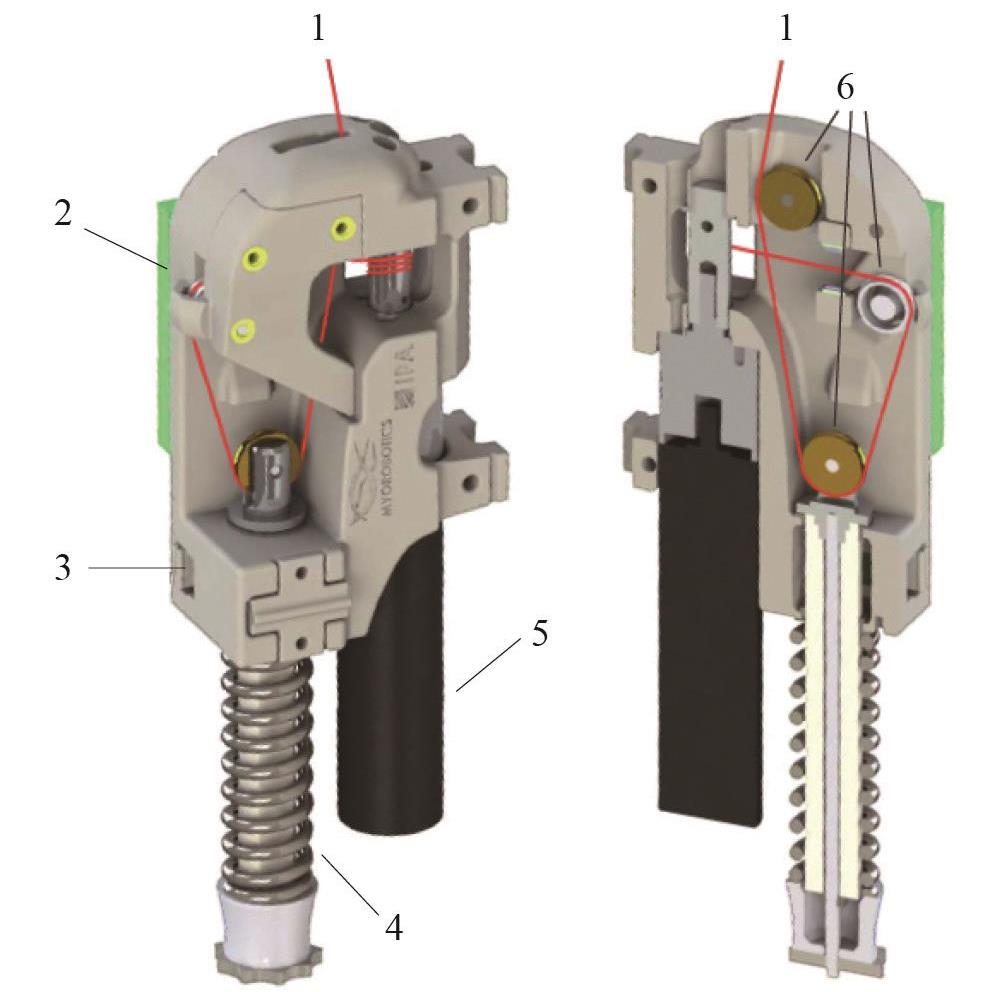
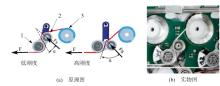
图3
德宇航DAVID手臂[11]注:1.导向轮;2.动滑轮;3.卷簧"
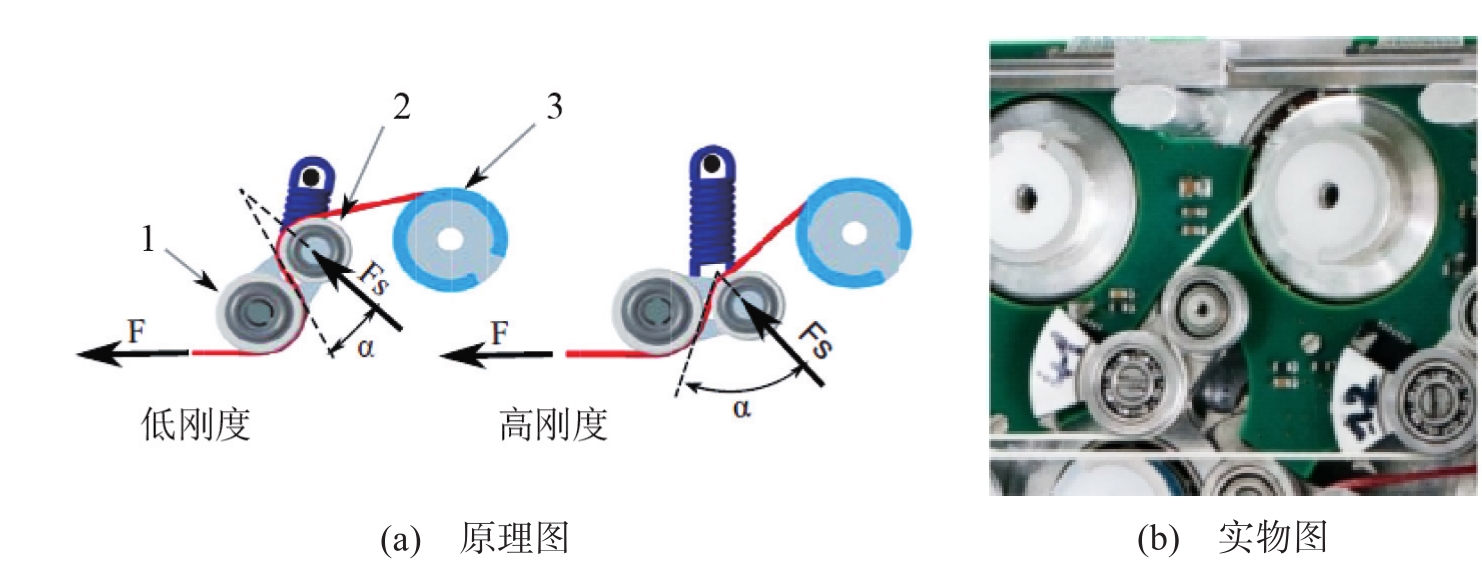
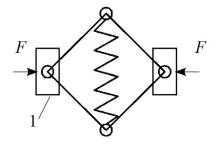
图4
四杆结构变刚度弹性元件变刚度原理注:1.滑块"

图5
连续状态耦合弹性驱动变刚度机构[12]"
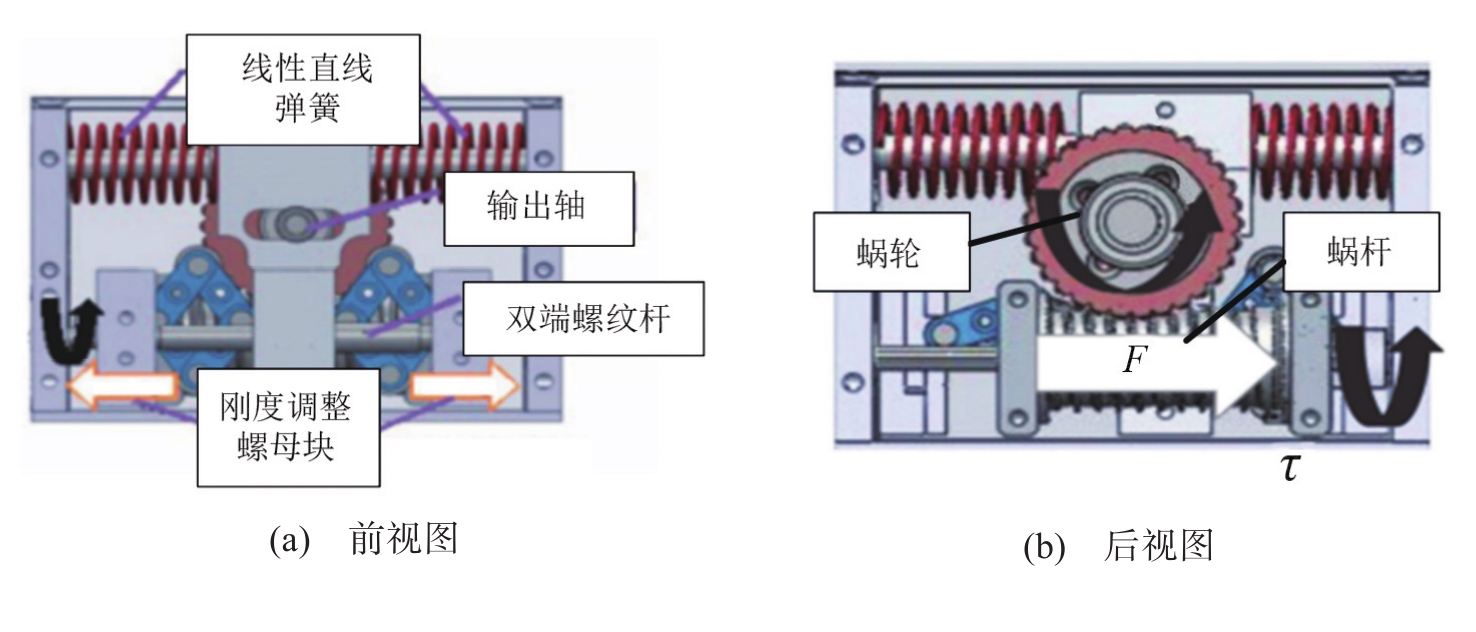
图6
四杆结构变刚度机构模型[13]注:1.输入法兰;2.输出法兰;3.滑轮组;4.外壳;5.蜗杆;6.钢缆;7.蜗轮;8.弹簧"
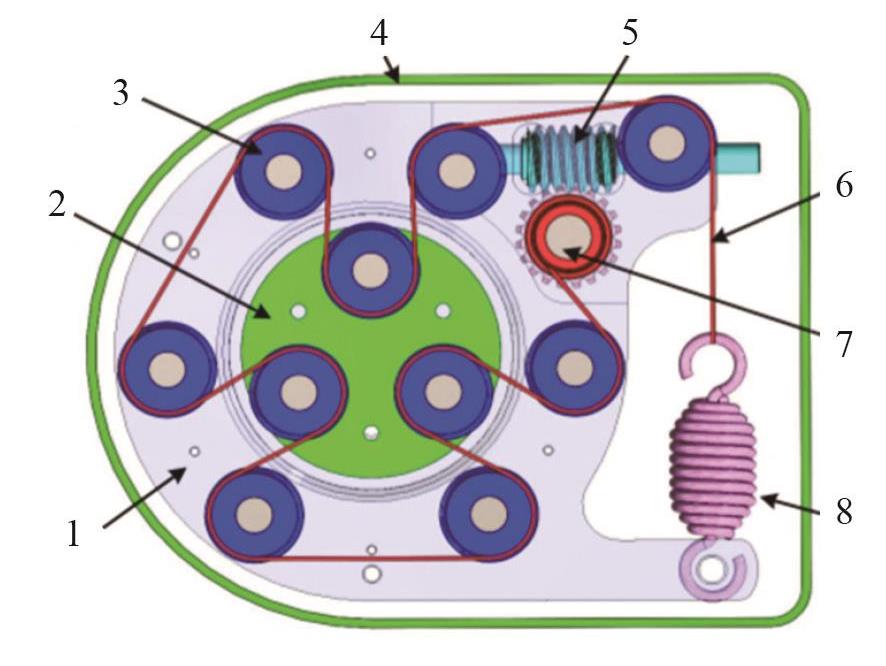

图7
杠杆结构变刚度驱动机构原理注:1.杠杆支点"
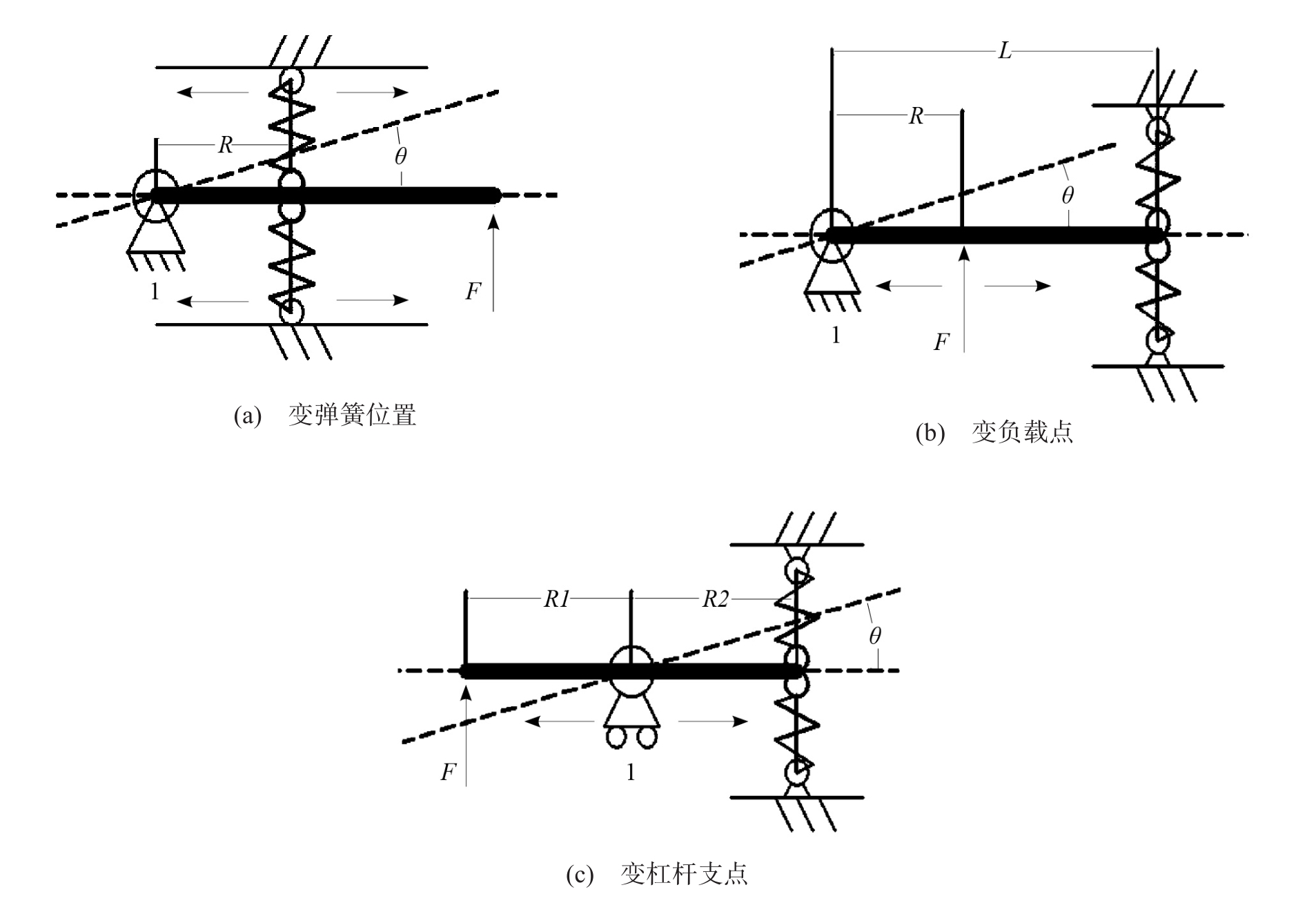

图8
变刚度驱动机构[15]"
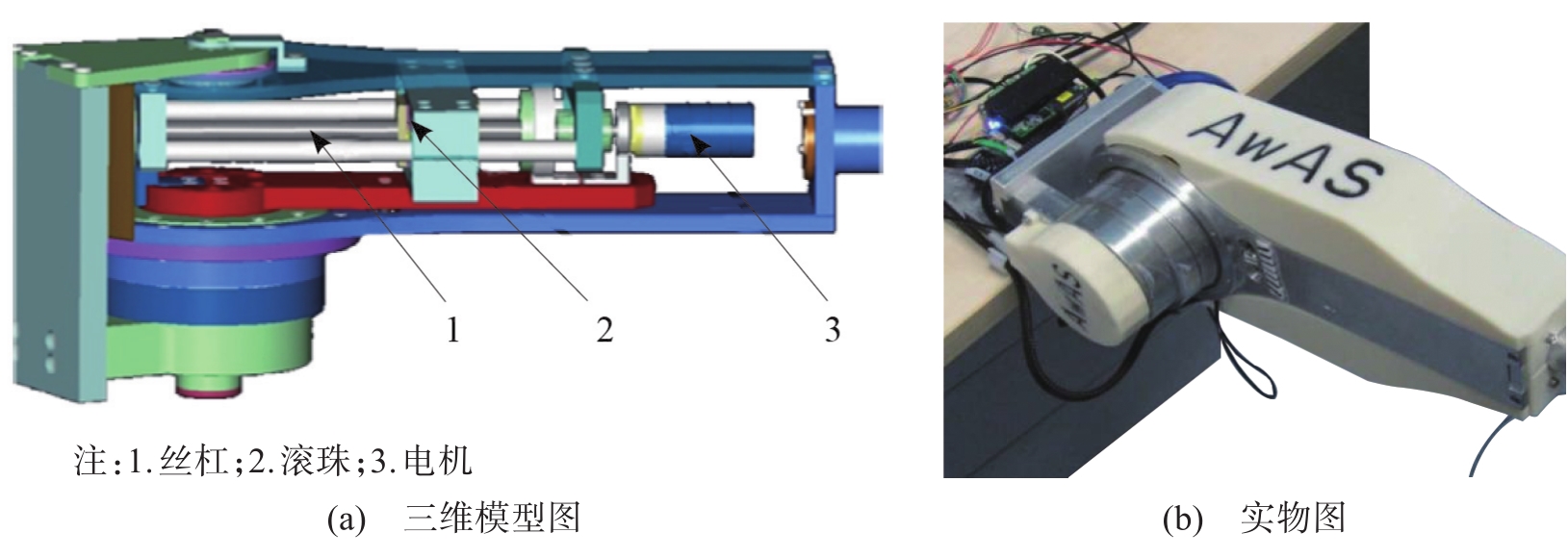
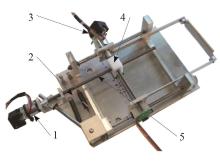
图9
变刚度驱动机构[16]注:1.电机1;2.弹簧;3.电机2;4.负载点;5.杠杆机构"
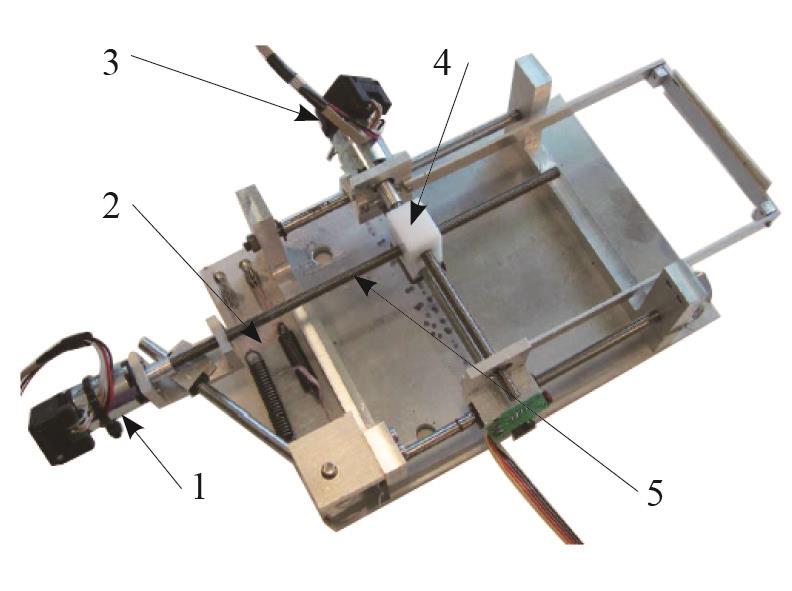
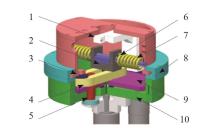
图10
旋转串联变刚度机构[17]注:1.;编码器;2.弹簧滑块;3.负载点;4.杠杆;5.杠杆支点;6.弹簧轴;7.对置弹簧;8.滑轨;9.阿基米德螺旋凸轮盘;10.输入端"
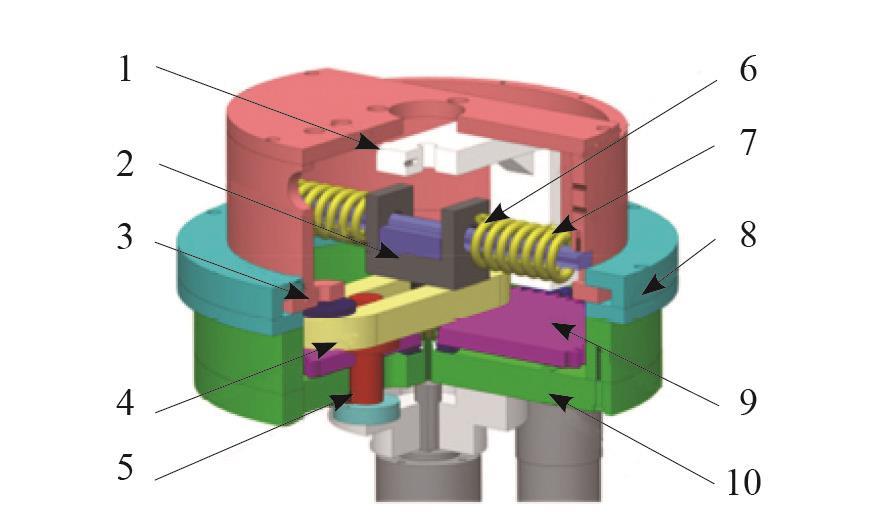
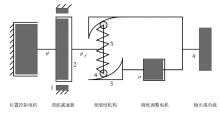
图11
特殊曲面结构原理注:1.刚轮;2.柔轮;3.线性弹簧;4.凸轮;5.凸轮盘"
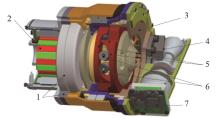
图12
变刚度关节FSJ示意图[18]注:1.谐波减速器;2.位置控制电机;3.凸轮盘支撑件;4.齿轮;5.凸轮盘;6.凸轮;7.刚度控制电机"
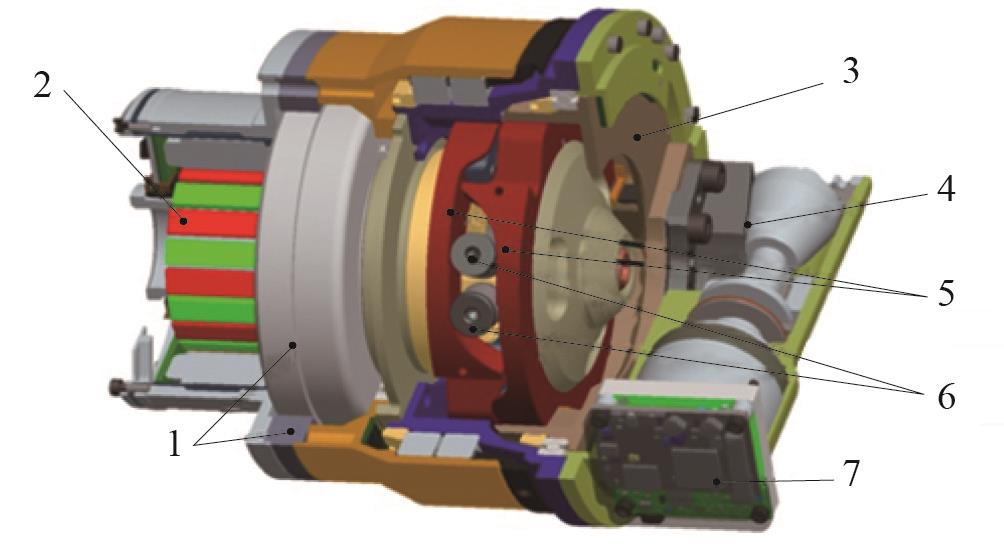
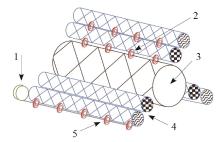
图13
气动连续体机械臂[21]注:1.编码器;2.制动器;3.伸展驱动器;4.收缩驱动器;5.尼龙丝"
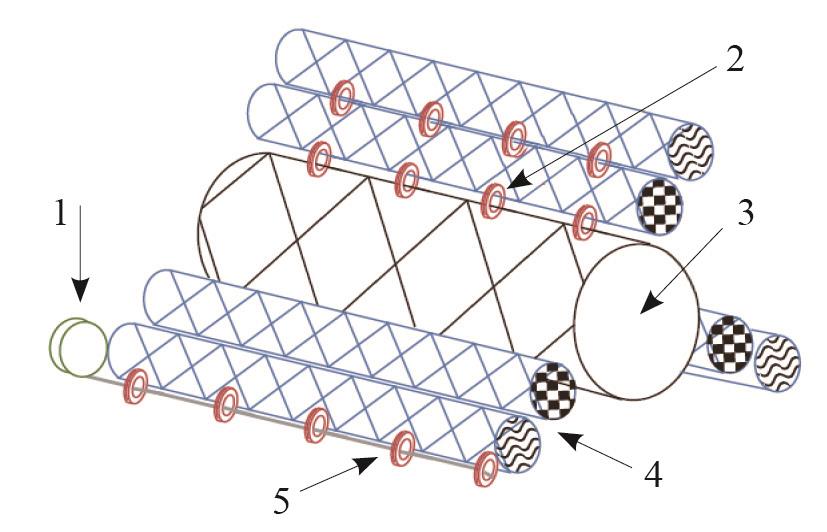
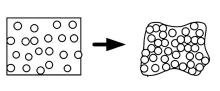
图14
阻塞原理"
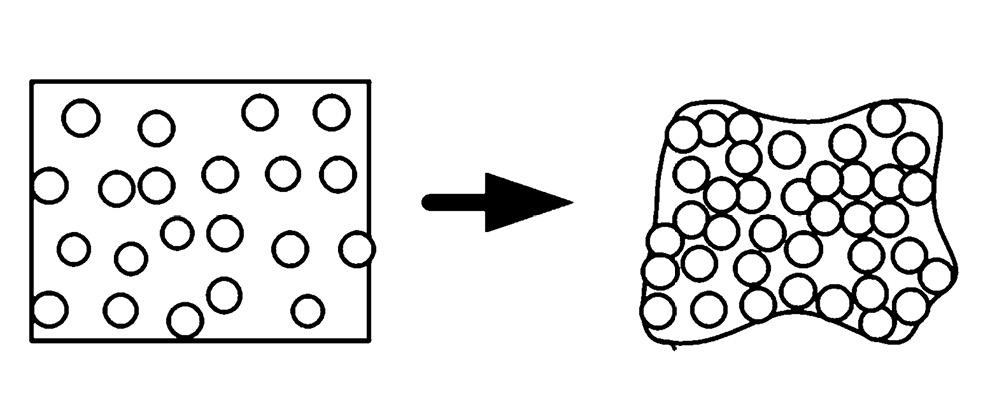

图15
无源粒子阻塞末端效应器[22]"

图16
层干扰原理"
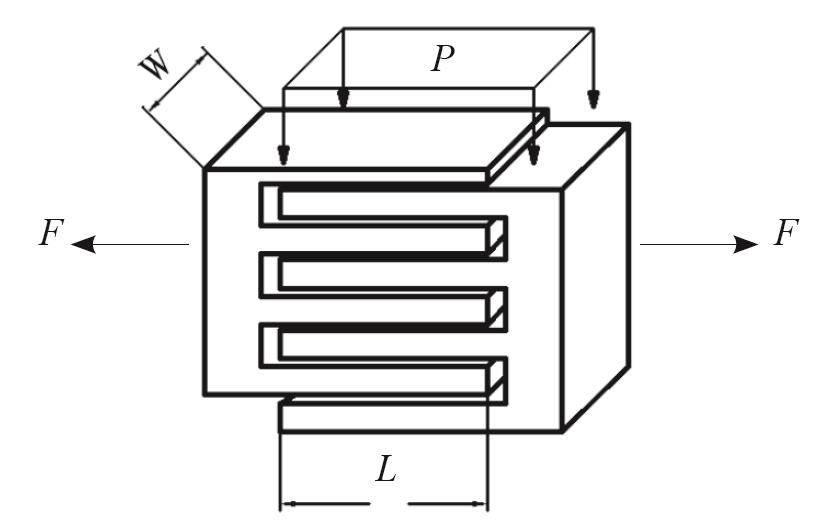
图17
滑动连杆层干扰机构层间干扰机构[24]"
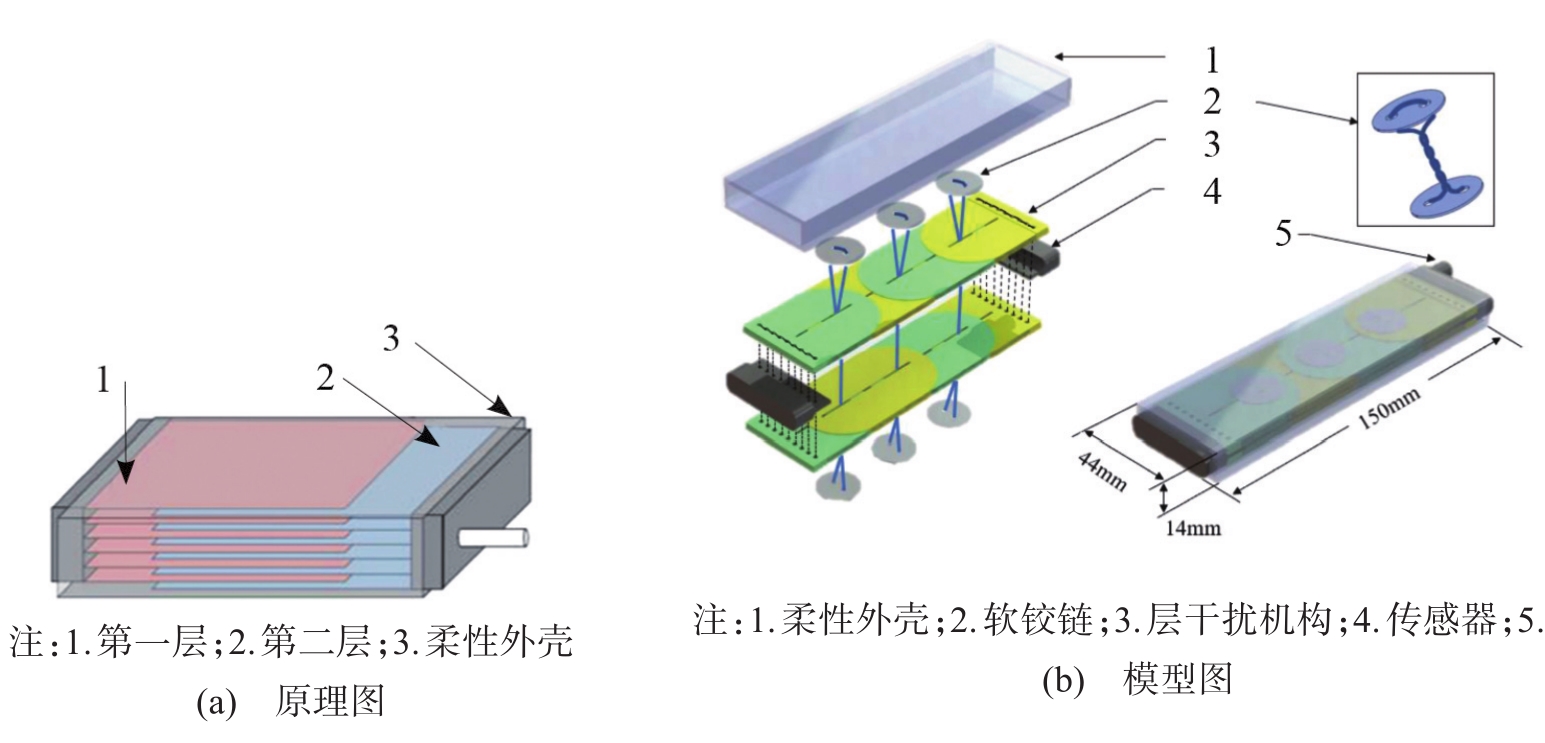
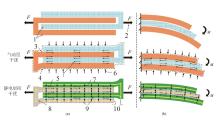
图18
静电层干扰[25]注:1.普通材料;2.外部力;3.真空;4.腔体;5.摩擦;6.空气压力;7.静电力;8.电极;9.绝缘材料;10.电源"
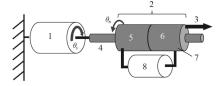
图19
磁丝杠变刚度驱动机构[26]注:1.位置控制电机;2.转轴组;3.力;4.磁性转轴1;5.磁转轴2;6.转轴3;7.固定旋转;8.刚度调节电机"
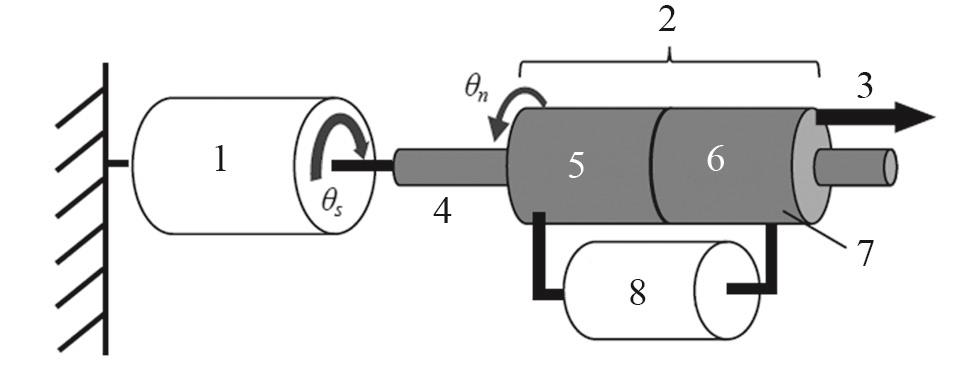

图20
记忆合金变刚度机构[27]注:1.聚二甲基硅氧烷;2.形状记忆合金;3.聚己内酯"
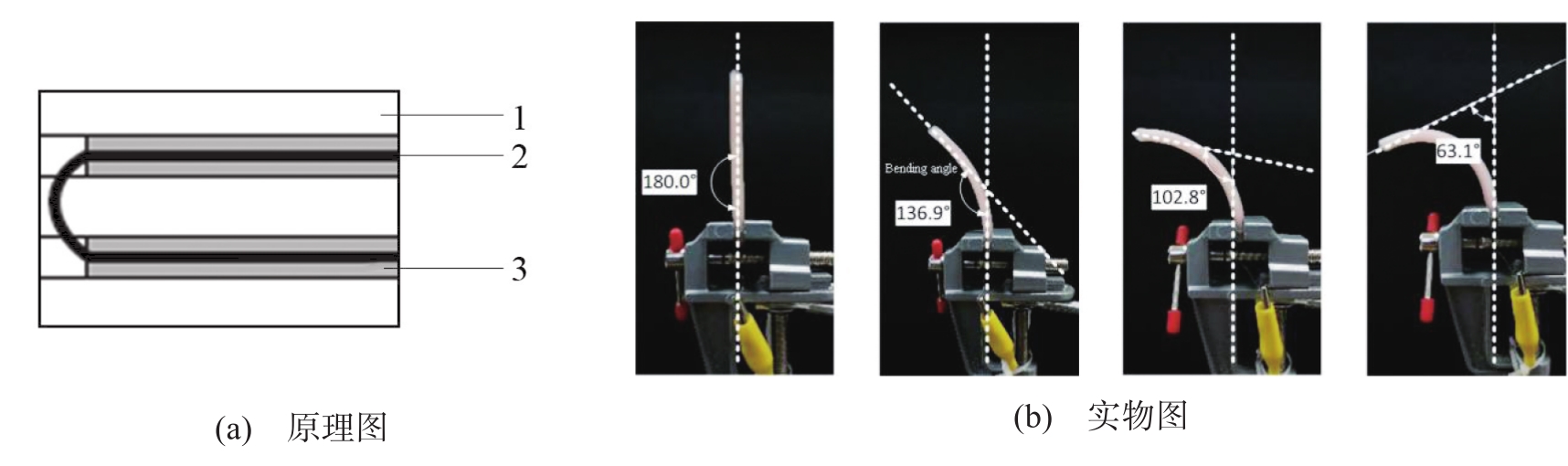
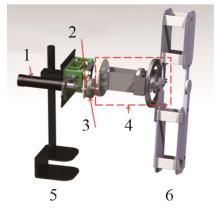
图21
肘关节外骨骼康复机器人[28]注:1.驱动电机;2.扭矩限制器;3.钢绳缆线;4.变刚度驱动机构;5.底座支架;6.上臂袖"
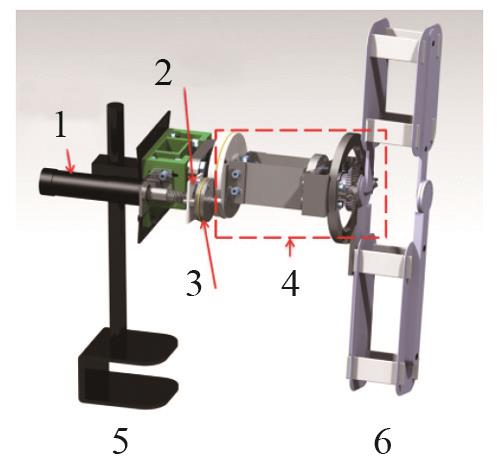
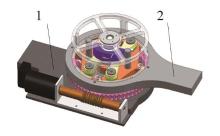
图22
膝关节康复机器人[29]注:1.输入端;2.负载端"
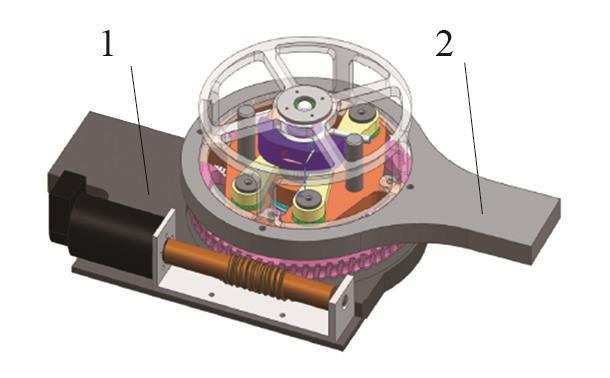

图23
无外动力变刚度储能机构[30]"


图24
变刚度肘关节假肢[31]"
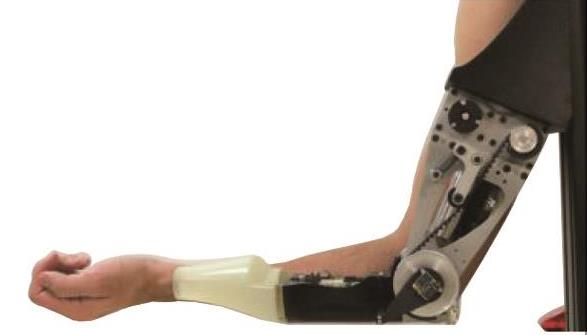

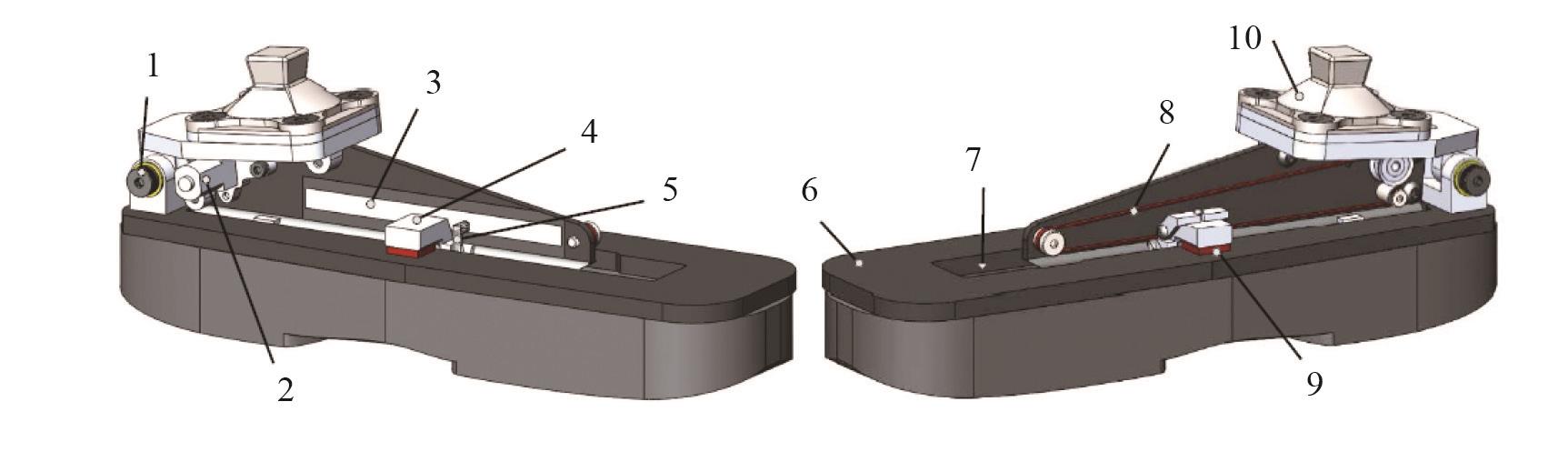
图25
准被动踝足假肢[32]注:1.旋转接头;2.直流电机;3.软管道;4.杠杆支点;5.杠杆臂;6.复合龙骨;7.挠度限位器;8.传动带;9.聚氨酯摩擦垫;10.适配器"
| 1 | GOPURA R A R C, BANDARA D S V, KIGUCHI K, et al. Developments in hardware systems of active upper-limb exoskeleton robots: a review [J]. Robot Auton Syst, 2016, 75: 203-220. |
| 2 | MARCHAL-CRESPO L, REINKENSMEYER D J. Review of control strategies for robotic movement training after neurologic injury [J]. J NeuroEng Rehabil, 2009, 6(1): 20. |
| 3 | CESTARI M, SANZ-MERODIO D, AREVALO J C, et al. An adjustable compliant joint for lower-limb exoskeletons [J]. IEEE-ASME T Mech, 2015, 20(2): 889-898. |
| 4 | 徐国政,陈雯,高翔,等. 基于阻抗辨识和混杂控制的机器人辅助抗阻训练方法[J]. 机械工程学报, 2016, 52(15): 8-14. |
| XU G Z, CHEN W, GAO X, et al. Robot-aided resistance training method based on impedance identification and hybrid control [J]. Chin J Mech Eng, 2016, 52(15): 8-14. | |
| 5 | WANG D, YU H. Development of the control system of a voice-operated wheelchair with multi-posture characteristics [C]. Wuhan, China: Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), IEEE, 2017: 151-155. |
| 6 | NICOL A C. Basic biomechanics of the musculoskeletal system [J]. J Biomech, 2002, 35(6): 872. |
| 7 | BICCHI A, TONIETTI G, BAVARO M, et al. Variable stiffness actuators for fast and safe motion control [J]. STAR, 2005, 15:527-536. |
| 8 | TONIETTI G, SCHIAVI R, BICCHI A. Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction [C]. Barcelona, Spain: International Conference on Robotics and Automation, IEEE, 2005: 526-531. |
| 9 | 王颜,房立金. 机械式仿骨骼肌变刚度机构原理及设计[J]. 机器人, 2015, 37(4): 506-512. |
| WANG Y, FANG L J. Principle and design of mechanically musculoskeletal variable-stiffness mechanism [J].Robot, 2015,37(4): 506-512. | |
| 10 | RICHTER C, JENTZSCH S, HOSTETTLER R, et al. Scalability in neural control of musculoskeletal robots [J]. IEEE Robot Autom Mag, 2016: 128-137. |
| 11 | GREBENSTEIN M, ALBU-SCHAFFER A, BAHLS T, et al. The DLR hand arm system [C]. Shanghai, China: IEEE International Conference on IEEE, 2011: 3175-3182. |
| 12 | CHENG P J, HUANG H P. Modeling and control of the CCEA robotic arm [C]. Karon Beach, Phuket, Thailand: International Conference on Robotics and Biomimetics, IEEE, 2011: 1171-1176. |
| 13 | LI Z, BAI S. Design and modelling of a compact variable stiffness mechanism for wearable elbow exoskeletons [C]. Delft, Netherlands: International Conference on Control, Mechatronics and Automation, IEEE, 2019: 342-346. |
| 14 | JAFARI A, TSAGARAKIS N G, SARDELLITTI I, et al. A new actuator with adjustable stiffness based on a variable ratio lever mechanism [J]. IEEE-ASME T Mech, 2014, 19(1): 55-63. |
| 15 | JAFARI A, TSAGARAKIS N G, VANDERBORGHT B, et al. A novel actuator with adjustable stiffness (AwAS) [C]. Taipei, China: International Conference on Intelligent Robots and Systems, IEEE,2010: 4201-4206. |
| 16 | VISSER L, CARLONI R, STRAMIGIOLI S. Energy-efficient variable stiffness actuators [J]. IEEE T Robot, 2011, 27(5): 865-875. |
| 17 | SUN J, GUO Z, ZHANG Y, et al. A novel design of serial variable stiffness actuator (SVSA) based on an archimedean spiral relocation mechanism [J]. IEEE-ASME T Mech, 2018, 23(5): 2121-2131. |
| 18 | WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ: energy based design of a variable stiffness joint [C]. Shanghai, China: International Conference on Robotics and Automation. IEEE, 2011: 5082-5089. |
| 19 | ZHU H, THOMAS U. A new design of a variable stiffness joint[C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 223-228. |
| 20 | YAN J. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators [J]. J Mech Eng En, 2018, 54(15): 1-14. |
| 21 | GIANNACCINI M E, XIANG C, ATYABI A, et al. Novel design of a soft lightweight pneumatic continuum robot arm with decoupled variable stiffness and positioning [J]. Soft Robot, 2017, 5(1): 54-70. |
| 22 | LI Y, CHEN Y, YANG Y, et al. Passive particle jamming and its stiffening of soft robotic grippers [J]. IEEE T Robot, 2017, 33(2): 446-455. |
| 23 | KIM Y, CHENG S, KIM S, et al. A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery [J]. IEEE T Robot, 2013, 29(4): 1031-1042. |
| 24 | CHOI W H, KIM S, LEE D, et al. Soft, multi-DOF, variable stiffness mechanism using layer jamming for wearable robots [J]. IEEE Roboti Autom Let, 2019, 4(3): 2539-2546. |
| 25 | WANG T, ZHANG J, LI Y, et al. Electrostatic layer jamming variable stiffness for softrobotics [J]. IEEE-ASME T Mech, 2019, 24(2): 424-433. |
| 26 | HEYA A, NAKATA Y, HIRATA K, et al. A magnetic lead screw with variable stiffness mechanism [C]. Neuchatel, Switzerland: International Symposium on Linear Drives for Industry Applications (LDIA), IEEE, 2019: 1-4. |
| 27 | LIAO T, TSE Z T H, REN H. Variable stiffness actuators embedded with soft-bodied polycaprolactone and shape memory alloy wires [C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 108-113. |
| 28 | LIU Y, GUO S, ZHANG S, et al. Modeling and analysis of a variable stiffness actuator for a safe home-based exoskeleton [C]. Changchun, China: International Conference on Mechatronics and Automation (ICMA), IEEE, 2018: 252-262. |
| 29 | SONG Z, HU X, DAI J. A Novel Design of Nonlinear Stiffness Actuator for Neurorehabilitation Robots [M]. Springer, 2018: 317-320. |
| 30 | Yu L Q, Wang K, Chen T N. A portable variable stiffness unpowered aided exoskeleton design [M]//Long S, Dhillon B. Man-Machine-Environment System Engineering. Springer, 2020: 357-367. |
| 31 | LEMERLE S, GRIOLI G, BICCHI A, et al. A Variable Stiffness Elbow Joint for Upper Limb Prosthesis [C]. Macau, China: International Conference on Intelligent Robots and Systems (IROS), IEEE, 2019: 7327-7334. |
| 32 | GLANZER E M, ADAMCZYK P G. Design and validation of a semi-active variable stiffness foot prosthesis [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018, 26(12): 2351-2359. |
| 33 | OSADA M, ITO N, NAKANISHI Y, et al. Realization of flexible motion by musculoskeletal humanoid "Kojiro" with add-on nonlinear spring units [C]. Nashville, TN, USA: International Conference on Humanoid Robots, IEEE, 2010: 174-179. |
| 34 | FURNÉMONT R, MATHIJSSEN G, HOEVEN T V D, et al. Torsion MACCEPA: a novel compact compliant actuator designed around the drive axis [C]. Seattle, WA, USA: International Conference on Robotics and Automation (ICRA), IEEE, 2015: 232-237. |
| 35 | SAVIN S, GOLOUSOV S, KHUSAINOV R, et al. Control system design for two link robot arm with MACCEPA2.0 variable stiffness actuators [C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 624-628. |
| [1] | 邵伟婷, 雷江华. 反应中断再定向干预孤独症谱系障碍儿童刻板语言的效果:Scoping综述[J]. 《中国康复理论与实践》, 2024, 30(1): 10-20. |
| [2] | 王航宇, 葛可可, 范永红, 都丽露, 邹敏, 封磊. 基于ICD-11和ICF主动式音乐疗法改善认知障碍老年人认知功能的系统综述[J]. 《中国康复理论与实践》, 2024, 30(1): 36-43. |
| [3] | 闻嘉宁, 金秋艳, 张琦, 李杰, 司琦. 认知参与型身体活动对发展儿童青少年执行功能的效果:基于ICF的系统综述[J]. 《中国康复理论与实践》, 2024, 30(1): 44-53. |
| [4] | 葛可可, 范永红, 王航宇, 都丽露, 李长江, 邹敏. 失眠老年人正念干预健康效益的系统综述[J]. 《中国康复理论与实践》, 2024, 30(1): 54-60. |
| [5] | 张婧雅, 邹敏, 孙宏伟, 孙昌隆, 朱峻同. 听障儿童青少年焦虑或抑郁情绪心理干预效果的系统综述[J]. 《中国康复理论与实践》, 2023, 29(9): 1004-1011. |
| [6] | 王俊宇, 杨永, 袁逊, 谢婷, 庄洁. 高强度间歇训练对健康儿童青少年执行功能效果的系统综述[J]. 《中国康复理论与实践》, 2023, 29(9): 1012-1020. |
| [7] | 魏晓微, 杨剑, 魏春艳. 特殊教育学校孤独症谱系障碍儿童参与适应性瑜伽活动的心理与行为效益的系统综述[J]. 《中国康复理论与实践》, 2023, 29(9): 1021-1028. |
| [8] | 杨亚茹, 杨剑. 基于WHO-HPS架构学校身体活动相关健康服务及其健康效益:系统综述的系统综述[J]. 《中国康复理论与实践》, 2023, 29(9): 1040-1047. |
| [9] | 史佳伟, 李凌宇, 杨浩杰, 王琴潞, 邹海欧. 预康复对全膝关节置换术后患者的有效性:系统综述的系统综述[J]. 《中国康复理论与实践》, 2023, 29(9): 1057-1064. |
| [10] | 蒋长好, 黄辰, 高晓妍, 戴元富, 赵国明. 神经反馈训练对老年人认知功能效果的系统综述[J]. 《中国康复理论与实践》, 2023, 29(8): 903-909. |
| [11] | 魏晓微, 杨剑, 魏春艳, 贺启令. 学校环境下适应性体育课程促进智力与发展性残疾儿童心理运动发展的系统综述[J]. 《中国康复理论与实践》, 2023, 29(8): 910-918. |
| [12] | 张园, 杨剑. 基于世界卫生组织健康促进学校架构的学校健康服务及效果:Scoping综述[J]. 《中国康复理论与实践》, 2023, 29(7): 791-799. |
| [13] | 王少璞, 陈钢. 基于世界卫生组织健康促进学校架构的心理行为健康服务及其健康效益:系统综述的系统综述[J]. 《中国康复理论与实践》, 2023, 29(7): 800-807. |
| [14] | 蒋长好, 高晓妍. 短时身体活动对儿童认知功能影响的系统综述[J]. 《中国康复理论与实践》, 2023, 29(6): 667-672. |
| [15] | 郑莉, 鲍治诚, 张琪, 任绪艳, 苏敏. 经皮耳迷走神经电刺激结合康复机器人训练对脑卒中患者上肢功能的效果[J]. 《中国康复理论与实践》, 2023, 29(6): 691-696. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||