


《Chinese Journal of Rehabilitation Theory and Practice》 ›› 2022, Vol. 28 ›› Issue (8): 989-992.doi: 10.3969/j.issn.1006-9771.2022.08.015
LI Siqi,ZHANG Yuling,YANG Jiantao( )
)
Received:2022-04-19
Revised:2022-07-07
Published:2022-08-25
Online:2022-08-30
Contact:
YANG Jiantao
E-mail:yjt@usst.edu.cn
CLC Number:
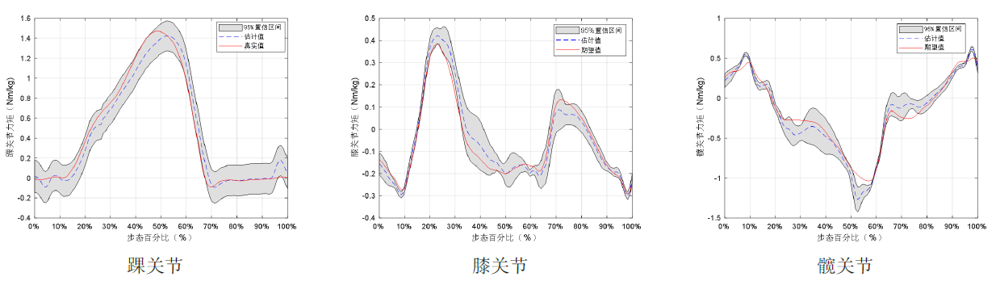
LI Siqi,ZHANG Yuling,YANG Jiantao. Estimation of joint torques in human gait based on Gaussian process[J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2022, 28(8): 989-992.

"
"
| 关节 | 第1次 | 第2次 | 第3次 |
|---|---|---|---|
| 踝关节 | 0.9129 | 0.9685 | 0.9450 |
| 膝关节 | 0.6278 | 0.8815 | 0.9516 |
| 髋关节 | 0.8668 | 0.9468 | 0.8778 |
"

| [1] | 蔡飞. 基于人体步态数据的下肢外骨骼动力学建模及应用研究[D]. 郑州: 中原工学院, 2019. |
| CAI F. Modeling and application of lower extremity exoskeleton dynamics based on human gait data[D]. Zhengzhou: Zhongyuan University of Technology, 2019. | |
| [2] | 刘会勇, 赵青. 下肢外骨骼助行机器人研究现状及发展趋势[J]. 机械设计与制造, 2013(8): 146-148, 151. |
| LIU H Y, ZHAO Q. Research status and development trends of lower extremity exoskeleton robot walker[J]. Machine Design Manufac, 2013(8):146-148, 151. | |
| [3] |
PFEIFER S, VALLERY H, HARDEGGER M, et al. Model-based estimation of knee stiffness[J]. IEEE Trans Biomed Eng, 2012, 59(9): 2604-2612.
doi: 10.1109/TBME.2012.2207895 |
| [4] |
LOSEY D P, MCDONALD C G, BATTAGLIA E, et al. A review of intent detection, arbitration, and communication aspects of shared control for physical human-robot interaction[J]. Appl Mech Rev, 2018, 70(1): 010804.
doi: 10.1115/1.4039145 |
| [5] | 尹逊锋. 基于肌电融合模型的正常步态下肢关节力矩解算的研究[D]. 哈尔滨江: 哈尔滨工业大学, 2021. |
| YIN X F. Research on lower limb with normal gait joint torque calculation based on EMG fusion model[D]. Harbin: Harbin Institute of Technology, 2021. | |
| [6] | 葛祎霏. 基于人体步态特性的下肢康复机器人控制系统设计[D]. 郑州: 中原工学院,2021. |
| GE Y F. Control system design of lower limb rehabilitation robot based on human gait characteristics[D]. Zhengzhou: Zhongyuan University of Technology, 2021. | |
| [7] | ZHANG J J, CHEAH C C, COLLINS S H. Experimental comparison of torque control methods on an ankle exoskeleton during human walking[C]. Seattle, WA, USA: IEEE International Conference on Robotics and Automation, 2015. |
| [8] | 张铁, 梁骁翃. 平面关节型机器人关节力矩的卡尔曼估计[J]. 浙江大学学报(工学版), 2018, 52(5): 951-959. |
| ZHANG T, LIANG X H. Kalman filter-based SCARA robot joint torque estimation[J]. J Zhejiang University (Engineering Ed), 2018, 52(5): 951-959. | |
| [9] |
EILENBERG M F, GEYER H, HERR H. Control of a powered ankle-foot prosthesis based on a neuromuscular model[J]. IEEE Trans Neural Sys Rehabil Eng, 2010, 18(2): 164-173.
doi: 10.1109/TNSRE.2009.2039620 |
| [10] | 王刚. 基于人体生理信号的下肢康复机器人交互控制方法研究[D]. 长春: 长春工业大学, 2021. |
| WANG G. Research on interaction control method of lower limb rehabilitation robot based on human physiological signals[D]. Changchun: Changchun University of Technology, 2021. | |
| [11] |
SARTORI M, MACULAN M, PIZZOLATO C, et al. Modeling and simulating the neuromuscular mechanisms regulating ankle and knee joint stiffness during human locomotion[J]. J Neurophysiol, 2015, 114(4): 2509-2527.
doi: 10.1152/jn.00989.2014 |
| [12] | HILL A V, PAGANINI-HILL A, ZEIGLER-HILL V. The heat of shortening and the dynamic constants of muscle[J]. Proc R Soc Lond Ser B-Biol Sci, 1938, 126(843): 136-195. |
| [13] | 熊保平, 史武翔, 林昱, 等. 基于Hill肌肉模型的人体关节力矩智能预测[J]. 北京生物医学工程, 2021, 40(1): 11-23. |
| XIONG B P, SHI W X, LIN Y, et al. Human joint moment prediction based on artificial neural network[J]. Beijing Biomed Eng, 2021, 40(1): 11-23. | |
| [14] | 秦菲菲, 赵韩, 黄康, 等. 基于UK理论的下肢关节力矩分析方法[J]. 应用力学学报, 2020, 37(5): 2141-2145, 2329-2330. |
| QIN F F, ZHAO H, HUANG K, et al. Analysis of lower extremity joint torque based on UK theory[J]. J Appl Mech, 2020, 37(5): 2141-2145, 2329-2330. | |
| [15] |
VASUDEVAN S. Data fusion with Gaussian processes[J]. Robot Auton Sys, 2012, 60(12): 1528-1544.
doi: 10.1016/j.robot.2012.08.006 |
| [16] | ROBERTSON D, CALDWELL G, HAMILL J, et al. Research Methods in Biomechanics[M]. 2nd ed. Champaign: Human Kinetics, 2013. |
| [17] | 孙立剑. 基于高斯过程的复杂光学曲面重建和多传感器数据融合方法研究[D]. 上海: 上海交通大学, 2018. |
| SUN L J. Research on complex optical surface reconstruction and multi-sensor data fusion method based on Gaussian process[D]. Shanghai: Shanghai Jiao Tong University, 2018. | |
| [18] | KOCIJAN J. Modelling and Control of Dynamic Systems Using Gaussian Process Models[M]. Cham: Springer, 2016. |
| [19] | BOYLE P, FREAN M. Dependent Gaussian Processes[M]. Cambridge: MIT Press, 2004: 217-224. |
| [20] |
YANG J T, YIN Y H. Dependent-Gaussian-process-based learning of joint torques using wearable smart shoes for exoskeleton[J]. Sensors, 2020, 20(13): 3685.
doi: 10.3390/s20133685 |
| [1] | QIU Fubing, YANG Yaru. Accessible facilities construction and assistive technology application of public sports venues in Shenzhen, Guangdong, China [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(12): 1465-1472. |
| [2] | ZHANG Hengrui, MENG Zhaoli, CUI Pei, WANG Ruiyi. Impact of different kinds of helmet-mounted display on human balance and posture control [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(11): 1359-1364. |
| [3] | CAI Huanian, FEI Sixian, ZHANG Yichen, SUN Qing, GUO Shuai, SONG Tao. Motion assistance analysis for robot-assisted tele-rehabilitation based on bilateral admittance control [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1104-1109. |
| [4] | ZHANG Yibin, LÜ Jie, YU Hongliu. Gait phase recognition in intelligent above-knee prosthesis based on fuzzy logic algorithm [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(8): 896-902. |
| [5] | SUN Zhijie, GUO Xin, LAN Zhi, WANG Qiang. Turn intention perception and fall detection for smart walkers [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(7): 849-855. |
| [6] | YAN Mei, JIANG Hua, DONG Liquan, LIU Bofei, HE Weijie, WU Xiaogao, GUO Zhiyang. Demand, supply and satisfaction of assistive technology in China based on rapid Assistive Technology Assessment data [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 373-380. |
| [7] | ZHU Changjian, ZHENG Shaoqi, GONG Zhibing, KE Xu, ZHAO Youpeng. Optimization and simulation of maneuverability and stability of electric wheelchair based on three degrees of freedom model [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 381-389. |
| [8] | YU Wenqiang, HOU Yutong, HUANG Chenglan, YANG Yunxiao, LU Dezhi, WANG Caiping, WANG Jinwu. Corrective effect of 3D printed scoliosis orthoses [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 390-395. |
| [9] | PAN Haihong, LI Taiwei, LIU Yuancai, LU Meiming, CHEN Lin. Mechanism design and analysis of a simple leg-sliding rehabilitation equipment [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 396-401. |
| [10] | ZHANG Yibin, LI Jianfeng, YU Hongliu. A microprocessor-controlled prosthetic knee and its gait symmetry assessment [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 402-407. |
| [11] | WANG Fang, YANG Tao, HE Yaoguang, CAO Zijun, LIU Guoqing, HU Jun, ZHANG Jianguo, FAN Yubo. Design of variable stiffness insole based on diabetics plantar pressure during gait period [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 408-415. |
| [12] | HUANG Chenglan, HOU Yutong, YANG Yunxiao, ZENG Hong, ZHANG Ziyan, ZHAO Wenkuan, WANG Zanbo, SHAN Chunlei, DAI Kerong, CAI Bin, WANG Jinwu. 3D printed orthopedic insoles for flatfoot: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(4): 416-422. |
| [13] | SHAN Xinying,YU Mengsun. Electroencephalogram power spectrum as motor imagery for lower limb amputees [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2022, 28(11): 1360-1364. |
| [14] | LIN Gao,ZHANG Daohui,ZHAO Xingang. A direct teaching technology of upper limb rehabilitation robot meeting individual difference [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2022, 28(10): 1231-1240. |
| [15] | ZHU Xu,LIU Jing,DONG Zeping,QIU Dawei. Gesture action intent recognition based on surface electromyography: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2022, 28(9): 1032-1038. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||