


Chinese Journal of Rehabilitation Theory and Practice ›› 2025, Vol. 31 ›› Issue (8): 914-921.doi: 10.3969/j.issn.1006-9771.2025.08.007
Previous Articles Next Articles
WANG Xiaofeng1, HU Mengqiao1, WANG Yan2, WEI Kun1( ), XU Wenzhu1, REN Dan1, MA Ye3
), XU Wenzhu1, REN Dan1, MA Ye3
Received:2025-07-11
Published:2025-08-25
Online:2025-09-01
Supported by:CLC Number:
WANG Xiaofeng, HU Mengqiao, WANG Yan, WEI Kun, XU Wenzhu, REN Dan, MA Ye. Effect of exoskeleton robot-assisted gait training on lower limb function after stroke and spinal cord injury: a systematic review[J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(8): 914-921.
Table 1
PICO framework"
| 人群(Population) | 干预(Intervention) | 对照/比较(Comparison) | 结局(Outcome) |
|---|---|---|---|
| 疾病状况 患有下肢功能障碍的脑卒中或脊髓损伤患者,涵盖急性期、亚急性期和慢性期 功能状态 步态稳定性和速度受损;足以理解和参与康复训练的认知功能 年龄 18岁以上 | 干预方式 RAGT包括可穿戴外骨骼(如BEAR-H1、EKSO-GT)、基于跑台的系统(如Lokomat, Walkbot)、平台式机器人(如Hunova®、Biomot)和智能控制策略(如按需辅助、自适应反馈、可调参数) 干预频率 干预持续时间 | 常规物理治疗 常规步行/功能训练 动态直立行走架训练 强化下肢训练 常规康复治疗 | 下肢运动功能与步态功能 步行能力(如6MWT、FAC、WISCI-II) 平衡功能(如BBS、TUGT) 下肢肌力(如FMA-LE、MS、LEMS) 功能独立性 日常生活活动能力(如BI、SCIM-III) 生活质量(如SS-QOL) |
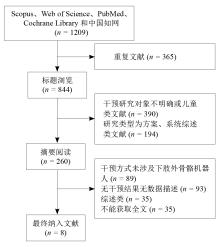
Figure 1
Flowchart of literature screening"
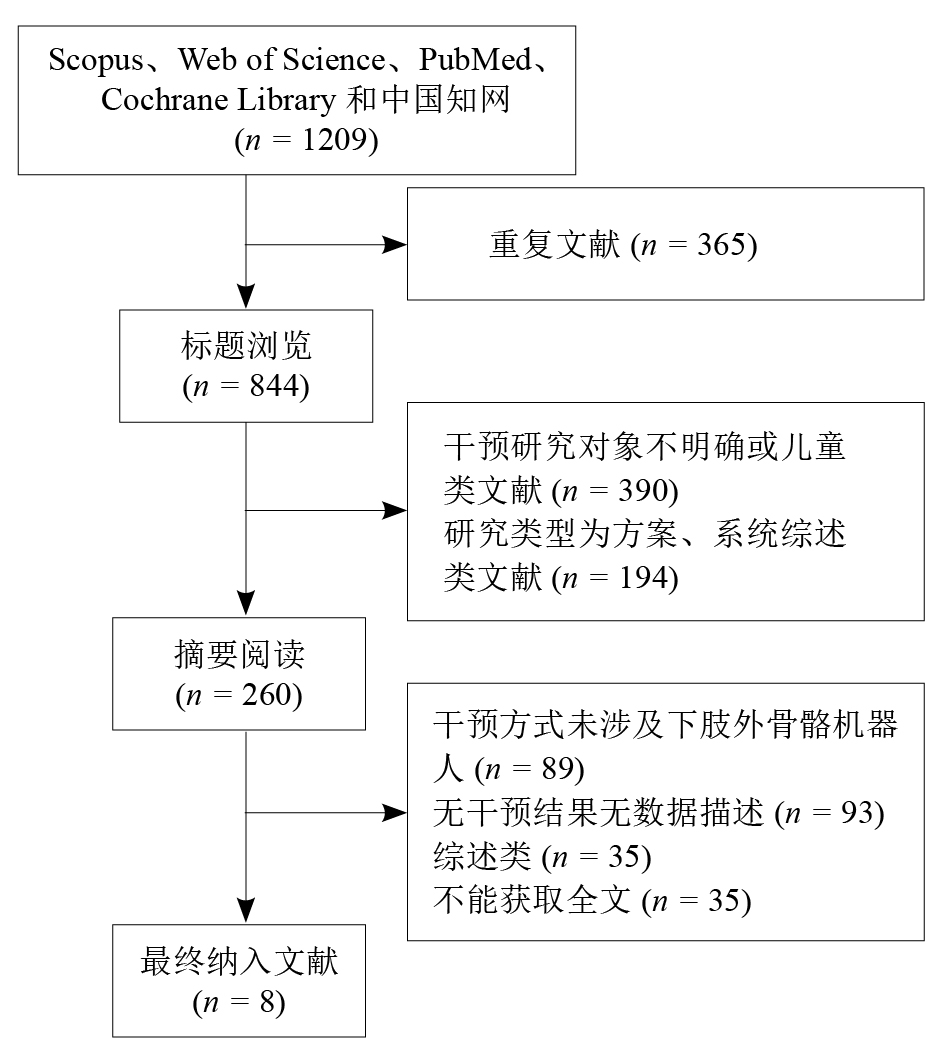
Table 2
Quality assessment of included studies"
| 纳入文献 | 资格标准 | 随机分配 | 分配隐藏 | 基线相似 | 被试施盲 | 治疗师施盲 | 评估者施盲 | 被试流失率< 15% | 意向治疗分析 | 组间统计比较 | 报告点测量和变异量值 | 总分 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Li等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 8 | ||
| Hao等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 9 | |
| Tarnacka等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 8 | ||
| Meng等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 9 | |
| Mıdık等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 9 | |
| Pournajaf等[ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 8 | ||
| Elmas Bodur等[ | √ | √ | √ | √ | √ | √ | √ | √ | 7 | |||
| Gupta等[ | √ | √ | √ | √ | √ | √ | √ | √ | 7 |
Table 3
Basic characteristics of included literatures"
| 纳入文献 | 国家 | 研究设计 | 样本特征(疾病、分期、n) | 干预 | 主要结局指标 | 主要结局 | |
|---|---|---|---|---|---|---|---|
| 干预组 | 对照组 | ||||||
| Li等[ | 中国 | 多中心、非劣效性、随机对照试验 | 脑卒中 亚急性期 n = 130 | 设备:BEAR-H1 干预频率:每次30 min,每天2次,每周5 d 持续时间:4周 | 常规步行训练 | 6MWT FAC FMA-LE Vicon步态分析 | 运动功能 6MWT、FMA-LE、FAC、步频和步态周期改善 功能独立性 未提及 |
| Hao等[ | 中国 | 随机对照试验 | 卒中后偏瘫肢体痉挛 n = 99 | 设备:智能康复训练系统 干预频率:15~30转/min,每次20 min,每天1次 持续时间:10周 | 常规康复训练系统,脑机接口康复训练系统 | 改良Ashworth量表 BBS Fugl-Meyer评定量表 BI | 运动功能 平衡能力改善 运动功能显著改善 功能独立性 日常生活活动能力提高 痉挛程度改善 |
| Tarnacka等[ | 波兰 | 单中心、单盲、随机对照试验 | 脊髓损伤 亚急性期 n = 105 | 设备:EKSO-GT/Lokomat 干预频率:每次30 min,每周6 d 持续时间:7周 | 动态直立行走架训练 | MS WISCI-II SCIM-III BI | 运动功能 步态功能改善 运动评分提高 功能独立性 未提及 |
| Meng等[ | 中国 | 单盲、随机对照试验 | 急性缺血性脑卒中 n = 192 | 设备:Walkbot 干预频率:每天 45 min,每周3 d 持续时间:4周 | 强化下肢训练常规康复治疗 | 6MWT FAC TUGT DTW Tinetti测试 BI SS-QOL 步态分析 | 运动功能 步态参数改善 身体活动能力增加 功能独立性 日常生活活动能力提高 |
| Mıdık等[ | 土耳其 | 随机对照试验 | 不完全性创伤性脊髓损伤(男性) n = 30 | 设备:Lokomat Pro 干预频率:每次30 min,每周3次 持续时间:5周 | 常规康复 | LEMS SCIM-III WISCI-II | 运动功能 下肢运动功能显著改善 功能独立性 功能独立性有所提高 |
| Pournajaf等[ | 意大利 | 随机对照试验 | 亚急性卒中 n = 89 | 设备:Lokomat-Pro和G-EO SystemTM 干预频率:每次30 min,每周3~5次 持续时间:6 周 | 物理治疗(如上肢康复、功能任务练习和肌肉强化)、言语治疗和/或职业治疗 | 10MWT 6MWT 改良BI | 运动功能 步态功能和耐力改善 功能独立性 日常生活活动能力提高 |
| Elmas Bodur等[ | 土耳其 | 随机对照试验 | 脑卒中 n = 32 | 设备:ExoAthlet和Lokomat Free-D 干预频率:每次30 min,每周3次 持续时间:8周 | 常规物理治疗 | 30秒椅子站立测试 6MWT SF-36 | 运动功能 步态功能改善 功能独立性 生活质量提升 |
| Gupta等[ | 印度 | 随机对照试验 | 慢性脑卒中 n = 25 | 设备:MARS 干预频率:每次30 min,每周5~6次 持续时间:共2周 | 常规踝关节康复 | 10MWT 6MWT TUGT FAC 改良Rankin量表 | 运动功能 步速和耐力显著提高 功能独立性 独立性得到改善 |
| [1] | GBD 2019 Stroke Collaborators. Global, regional, and national burden of stroke and its risk factors, 1990-2019: a systematic analysis for the Global Burden of Disease Study 2019[J]. Lancet Neurol, 2021, 20(10): 795-820. |
| [2] | World Stroke Organization. World Stroke Organization Annual Report 2018[R/OL]. (2018-03-10)[2025-03-13]. https://www.world-stroke.org/assets/downloads/Annual_Report_2018_online_fnal_COMPRESSED.pdf. |
| [3] |
FEIGIN V L, BRAININ M, NORRVING B, et al. World Stroke Organization: Global Stroke Fact Sheet 2025[J]. Int J Stroke, 2025, 20(2): 132-144.
doi: 10.1177/17474930241308142 pmid: 39635884 |
| [4] | BICKENBACH J, OFFICER A, SHAKESPEARE T, et al. International perspectives on spinal cord injury: summary[R]. Geneva: World Health Organization, 2013. |
| [5] |
FEIGIN V L, BRAININ M, NORRVING B, et al. World Stroke Organization (WSO): Global Stroke Fact Sheet 2022[J]. Int J Stroke, 2022, 17(1): 18-29.
doi: 10.1177/17474930211065917 pmid: 34986727 |
| [6] |
DIPIRO N D, EMBRY A E, FRITZ S L, et al. Effects of aerobic exercise training on fitness and walking-related outcomes in ambulatory individuals with chronic incomplete spinal cord injury[J]. Spinal Cord, 2016, 54(9): 675-681.
doi: 10.1038/sc.2015.212 pmid: 26666508 |
| [7] | MEHRHOLZ J, THOMAS S, ELSNER B. Treadmill training and body weight support for walking after stroke[J]. Cochrane Database Syst Rev, 2017, 8(8): Cd002840. |
| [8] |
林星茹, 赵盈喆, 刘亚, 等. 东亚地区物理治疗师配置、教育培训与职业准入体系的比较研究[J]. 中国康复理论与实践, 2022, 28(11): 1334-1341.
doi: 10.3969/j.issn.1006-9771.2022.11.013 |
| LIN X R, ZHAO Y Z, LIU Y, et al. Comparative study of physical therapist allocation, education and training, and professional accreditation system in East Asia[J]. Chin J Rehabil Theory Pract, 2022, 28(11): 1334-1341. | |
| [9] | ALQAHTANI M S, COOPER G, DIVER C, et al. Exoskeletons for lower limb applications: a review[M]//BÁRTOLO P J, BIDANDA B. Bio-materials and prototyping applications in medicine. Cham: Springer International Publishing, 2021: 139-164. |
| [10] |
GORGEY A S, WADE R, SUMRELL R, et al. Exoskeleton training may improve level of physical activity after spinal cord injury: a case series[J]. Top Spinal Cord Inj Rehabil, 2017, 23(3): 245-255.
doi: 10.1310/sci16-00025 pmid: 29339900 |
| [11] | MEHRHOLZ J, THOMAS S, WERNER C, et al. Electromechanical-assisted training for walking after stroke[J]. Cochrane Database Syst Rev, 2017, 5(4): CD006185. |
| [12] |
SONG K J, CHUN M H, LEE J, et al. The effect of robot-assisted gait training on cortical activation in stroke patients: a functional near-infrared spectroscopy study[J]. NeuroRehabilitation, 2021, 49(1): 65-73.
doi: 10.3233/NRE-210034 pmid: 33998555 |
| [13] | PAGE M J, MCKENZIE J E, BOSSUYT P M, et al. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews[J]. BMJ, 2021, 372(29): n71. |
| [14] |
CASHIN A G, MCAULEY J H. Clinimetrics: Physiotherapy Evidence Database (PEDro) Scale[J]. J Physiother, 2020, 66(1): 59.
doi: S1836-9553(19)30092-X pmid: 31521549 |
| [15] | LI Y, FAN T, QI Q, et al. Efficacy of a novel exoskeletal robot for locomotor rehabilitation in stroke patients: a multi-center, non-inferiority, randomized controlled trial[J]. Front Aging Neurosci, 2021, 23(13): 706569c. |
| [16] | HAO M, FANG Q, WU B, et al. Rehabilitation effect of intelligent rehabilitation training system on hemiplegic limb spasms after stroke[J]. Open Life Sci, 2023, 18(1): 20220724. |
| [17] | TARNACKA B, KORCZYŃSKI B, FRASUŃSKA J. Impact of robotic-assisted gait training in subacute spinal cord injury patients on outcome measure[J]. Diagnostics (Basel), 2023, 13(11): 1966. |
| [18] | MENG G, MA X, CHEN P, et al. Effect of early integrated robot-assisted gait training on motor and balance in patients with acute ischemic stroke: a single-blinded randomized controlled trial[J]. Ther Adv Neurol Disord, 2022, 15(3): 17562864221123195. |
| [19] | MIDIK M, PAKER N, BUĞDAYCI D, et al. Effects of robot-assisted gait training on lower extremity strength, functional independence, and walking function in men with incomplete traumatic spinal cord injury[J]. Turk J Phys Med Rehabil, 2020, 66(1): 54-59. |
| [20] | POURNAJAF S, CALABRÒ R S, NARO A, et al. Robotic versus conventional overground gait training in subacute stroke survivors: a multicenter controlled clinical trial[J]. J Clin Med, 2023, 12(2): 439. |
| [21] | ELMAS BODUR B, ERDOĞANOĞLU Y, ASENA SEL S. Effects of robotic-assisted gait training on physical capacity, and quality of life among chronic stroke patients: a randomized controlled study[J]. J Clin Neurosci, 2024, 120(2): 129-137. |
| [22] |
GUPTA A, PRAKASH N B, SANNYASI G, et al. Effect of overground gait training with 'Mobility Assisted Robotic System-MARS' on gait parameters in patients with stroke: a pre-post study[J]. BMC Neurol, 2023, 23(1): 296.
doi: 10.1186/s12883-023-03357-6 pmid: 37558991 |
| [23] | CALABRÒ R S, BILLERI L, CIAPPINA F, et al. Toward improving functional recovery in spinal cord injury using robotics: a pilot study focusing on ankle rehabilitation[J]. Expert Rev Med Devices, 2022, 19(1): 83-95. |
| [24] | CHEN S C, KANG J H, PENG C W, et al. Adjustable parameters and the effectiveness of adjunct robot-assisted gait training in individuals with chronic stroke[J]. Int J Environ Res Public Health, 2022, 19(13): 8186. |
| [25] |
FIROUZI V, SEYFARTH A, SONG S, et al. Biomechanical models in the lower-limb exoskeletons development: a review[J]. J Neuroeng Rehabil, 2025, 22(1): 12.
doi: 10.1186/s12984-025-01556-5 pmid: 39856714 |
| [26] | RV M, RAKSHIT S. Deep reinforcement learning based control of lower limb exoskeleton[C]. Yokohama, Japan:2024 International Joint Conference on Neural Networks (IJCNN), 2024. |
| [1] | YANG Tongnian, REN Jie, XIAO Hui. Effect of physical activity on anxiety for children and adolescents: a systematic review of systematic reviews [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(8): 883-888. |
| [2] | ZHANG Ziang, CHEN Jing, SHEN Mengru, GENG Zongxiao, HAN Xue, ZHAO Xu, XU Lei. Comparison of effect of different types of exercise on gait and balance for stroke patients [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(8): 896-905. |
| [3] | ZHANG Zihan, GUAN Jinzhi, HUANG Xing, ZHOU Li, ZHANG Yaxuan, ZHANG Mengyuan, CHANG Jingling. Characteristics of time-domain and time-frequency of Chinese word-picture matching task-related electroencephalogram in patients with post-stroke aphasia [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(8): 947-957. |
| [4] | REN Liangxiang, MEI Peipei, MAO Erli, TANG Yifan, WANG Xue, YE Yiqing. Needs of full participation in intestinal management for primary caregivers of patients with neurogenic bowel dysfunction after spinal cord injury: a qualitative study [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(8): 965-971. |
| [5] | DU Wenqian, ZHANG Xu, CHEN Jiwei, WANG Xing, ZHU Kun. Effect of exercise on freezing of gait in Parkinson's disease: a meta-analysis [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(7): 781-789. |
| [6] | SUN Wanting, YASEN Ailipinai, GONG Xiang, XIAO Yue, GAN Zhaodan, LIU Mingjie, ZENG Lanting, MA Shuyue, LU Jun, XU Guangxu. Effect of high-frequency repetitive transcranial magnetic stimulation on upper limb function of stroke patients based on motor sequence learning [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(7): 812-821. |
| [7] | SHAN Lei, LIU Ying, ZHANG Xin, CHI Qianqian, ZHU Xiaomin. Effect of accelerated intermittent theta burst stimulation on post-stroke depression [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(7): 822-829. |
| [8] | LI Qiaozhen, FENG Feng, DU Xia, SHAO Wen, GAO Mi, HUI Linna, YUAN Hua, SUN Xiaolong. Characteristics of electroencephalography in neuropathic pain after spinal cord injury [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(7): 830-837. |
| [9] | LIU Lanqun, LI Yanli, LIANG Jiaqi, CHEN Shuang, LIU Huilin. Effect of scalp acupuncture combined with computer-assisted training on memory impairment after stroke [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(7): 862-868. |
| [10] | GU Yiqing, CHENG Shupeng, LI Yongqiang, MAO Erli, LI Jian'an. Capping versus non-capping decannulation strategy in adult tracheostomized patients: a systematic review [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(6): 666-673. |
| [11] | LIU Xuan, GAO Ling, CHU Fengming, CHEN Jie, ZHANG Ming. Effect of brain-computer interface combined with upper limb rehabilitation robot on upper limb function of stroke patients [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(6): 703-710. |
| [12] | ZHOU Tiantian, ZHANG Tong, ZHANG Qi, LIANG Yanhua, ZHANG Yanqing, YUE Qing, LI Sijia. Effect of Lokomat robotic-assisted gait training on lower limb motor function in children with hemiplegia [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(6): 711-720. |
| [13] | FU Guojun, YU Xiufang, LÜ Xin, JI Lu, LIU Huaqing. Effect of composite electromagnetic stimulation combined with chin tuck against resistance on post-stroke patients with dysphagia [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(6): 721-728. |
| [14] | LIANG Dan, WANG Weining, LI Ce, WU Yue, XU Shu, XIE Hongyu, WU Yi, ZHU Yulian. Effect of synchronous brain bionic electrical stimulation in hyperbaric oxygen chamber on stroke-related sleep disorders [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(5): 497-504. |
| [15] | BAI Min, CAO Lihua, YE Ziqi, ZHOU Dingjie, LI Xueping. Effect of electromyographic perception-assisted robotic training combined with paired association stimulation on upper limb function in hemiplegic patients after stroke [J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(5): 505-512. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||