


Chinese Journal of Rehabilitation Theory and Practice ›› 2025, Vol. 31 ›› Issue (9): 1101-1115.doi: 10.3969/j.issn.1006-9771.2025.09.014
Previous Articles Next Articles
SU Benyue1,2,3( ), LIU Wenyao2,3, ZONG Wenjie2,3, WANG Baoqian2,3, SHENG Min4
), LIU Wenyao2,3, ZONG Wenjie2,3, WANG Baoqian2,3, SHENG Min4
Received:2025-07-30
Revised:2025-08-28
Published:2025-09-25
Online:2025-10-10
Contact:
SU Benyue, E-mail: Supported by:CLC Number:
SU Benyue, LIU Wenyao, ZONG Wenjie, WANG Baoqian, SHENG Min. Adaptive temporal alignment-based motion intention recognition for intelligent lower-limb prostheses[J]. Chinese Journal of Rehabilitation Theory and Practice, 2025, 31(9): 1101-1115.
Table 1
Information of healthy subjects"
| 编号 | 性别 | 年龄/岁 | 身高/cm | 体质量/kg |
|---|---|---|---|---|
| HV01 | 男 | 24 | 183 | 83 |
| HV02 | 男 | 27 | 180 | 70 |
| HV03 | 男 | 26 | 162 | 55 |
| HV04 | 男 | 27 | 173 | 78 |
| HV05 | 男 | 30 | 175 | 69 |
| HV06 | 女 | 26 | 170 | 60 |
| HV07 | 女 | 24 | 165 | 52 |
| HV08 | 女 | 24 | 178 | 62 |
| HV09 | 女 | 24 | 163 | 49 |
| HV10 | 女 | 18 | 155 | 40 |

Figure 1
Schematic diagram of the simulator and wearable sensors"

Table 2
13 types of movement patterns"
| 模式类别 | 运动模式 | 运动模式描述 |
|---|---|---|
| 转换模式 | 行走—上楼 | 平地行走到上楼转换 |
| 行走—下楼 | 平地行走到下楼转换 | |
| 行走—上坡 | 平地行走到上坡转换 | |
| 行走—下坡 | 平地行走到下坡转换 | |
| 上楼—行走 | 上楼到平地行走转换 | |
| 下楼—行走 | 下楼到平地行走转换 | |
| 上坡—行走 | 上坡到平地行走转换 | |
| 下坡—行走 | 下坡到平地行走转换 | |
| 稳态模式 | 行走 | 平地行走 |
| 上楼 | 稳步上台阶 | |
| 下楼 | 稳步下台阶 | |
| 上坡 | 稳步上坡 | |
| 下坡 | 稳步下坡 |

Figure 2
Motion capture device of Noitom Perception Legacy "

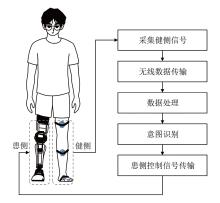
Figure 3
Relationship between the sound limb and the prosthetic limb"

Figure 4
Flowchart of the motion intention recognition process"

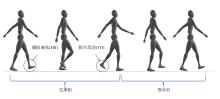
Figure 5
Schematic diagram of gait cycle"

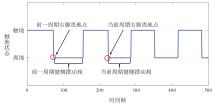
Figure 6
Illustration of right foot strike phase"
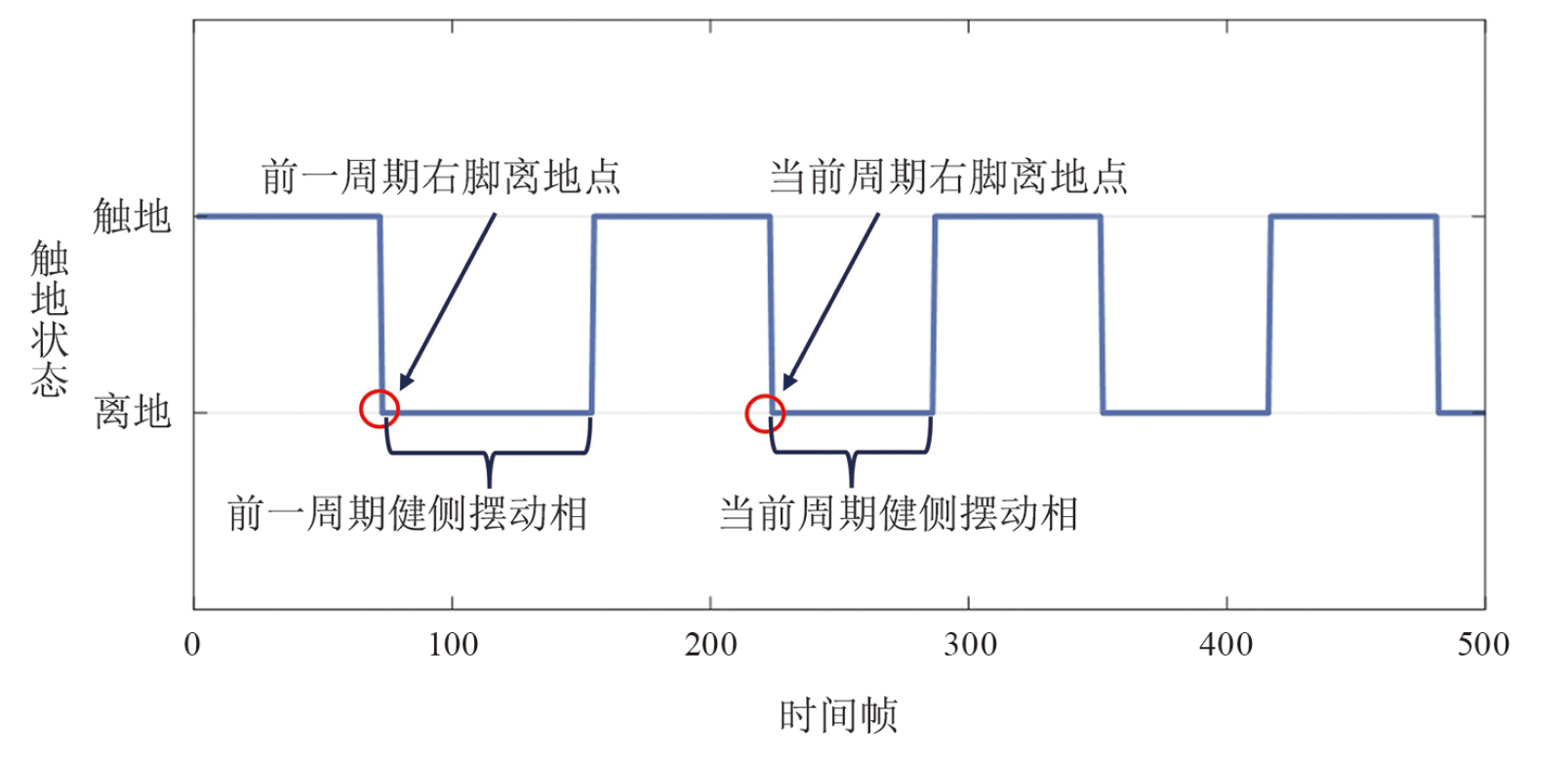
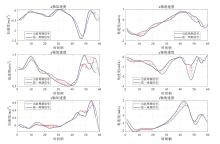
Figure 7
Optimal warping path in DTW"

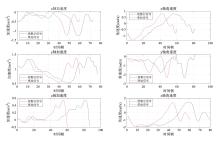
Figure 8
Comparison before and after DTW alignment"


Figure 9
Confusion matrix of five steady modes"
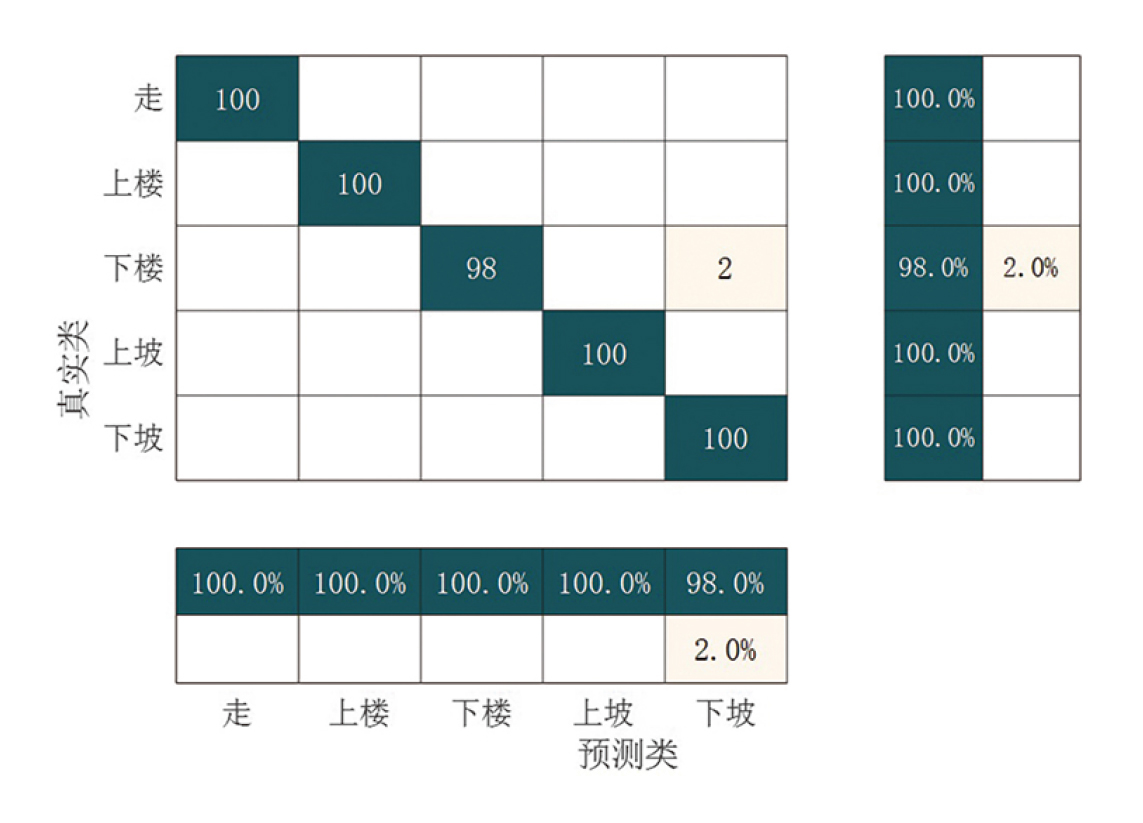
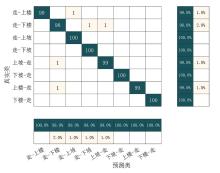
Figure 10
Confusion matrix of eight transitional modes"

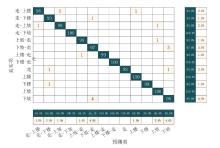
Figure 11
Confusion matrix of 13 motion modes"

Table 3
Comparative efficacy experiment of dynamic data extraction versus temporal alignment optimization 单位:%"
| 数据提取与处理 | 特征 | 准确率 | 精确率 | 召回率 | F1得分 |
|---|---|---|---|---|---|
| 摆动相前45帧 | 均值方差最值 | 97.06 | 98.55 | 97.42 | 97.93 |
| 摆动相前45帧 | 小波4层低频系数 | 97.98 | 99.02 | 98.51 | 98.73 |
| 完整摆动相+自适应时序对齐 | 均值方差最值 | 98.02 | 99.89 | 98.10 | 98.96 |
| 完整摆动相+自适应时序对齐 | 小波4层低频系数 | 98.51 | 99.58 | 98.31 | 98.91 |
Table 4
Performance comparison of different classifiers"
| 分类器 | 地形识别 准确率/% | 最终结果 | ||||
|---|---|---|---|---|---|---|
| 准确率/% | 精确率/% | 召回率/% | F1得分/% | 时间消耗/s | ||
| LDA | 84.74 | 95.16 | 99.07 | 98.08 | 98.54 | 0.0291 |
| KNN | 93.17 | 94.32 | 96.98 | 95.30 | 96.05 | 0.0011 |
| SVM | 94.27 | 98.51 | 99.58 | 98.31 | 98.91 | 0.0102 |
| RF | 90.19 | 95.49 | 98.30 | 98.21 | 98.20 | 0.1211 |
| GNB | 76.15 | 77.88 | 93.76 | 87.32 | 90.08 | 0.1399 |
Table 5
Interpolated frame count analysis"
| 插值帧数 | 准确率/% | 精确率/% | 召回率/% | F1得分/% | 时间消耗/s |
|---|---|---|---|---|---|
| 16帧 | 95.45 | 98.71 | 98.01 | 98.33 | 0.0104 |
| 32帧 | 98.06 | 98.95 | 98.86 | 98.89 | 0.0140 |
| 64帧 | 98.51 | 99.58 | 98.31 | 98.91 | 0.0102 |
| 128帧 | 98.19 | 99.54 | 98.03 | 98.75 | 0.0181 |
| 256帧 | 98.04 | 99.49 | 97.91 | 98.66 | 0.0353 |
Table 6
Comparison of experimental methods and results"
| 文献 | 传感器 | 特征 | 运动模式种类/n | 识别精度/% | ||
|---|---|---|---|---|---|---|
| 类型 | 位置 | 稳态 | 转换 | |||
| 苏本跃等[ | IMU | 健侧 | 均值方差最值 | 5 | 8 | 95.10 |
| Sheng等[ | IMU | 健侧 | DTCWT的5层低频系数 | 5 | 8 | 97.27 |
| Liu等[ | IMU 地面反作用力鞋垫 | 健侧 | 大腿相图形状 膝关节角轨迹等 | 6 | - | 99.16 |
| Zheng等[ | IMU 压力传感器 | 患侧 | 大腿倾斜角 足部倾斜角 步态相位等 | 7 | 18 | 98.04 |
| 本研究方法 | IMU | 健侧 | Haar小波的4层低频系数 | 5 | 8 | 98.51 |
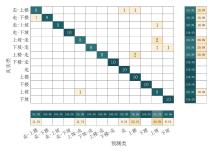
Figure 12
Confusion matrix of 13 motion modes for a transtibial amputee"

| [1] | 中国残疾人联合会. 2024年残疾人事业发展统计公报[EB/OL]. (2025-05-08) [2025-06-11]. https://www.cdpf.org.cn/zwgk/zccx/tjgb/1706f34657364af9a52b67f77d8c9f2b.htm. |
| [2] | ASIF M, TIWANA M I, KHAN U S, et al. Advancements, trends and future prospects of lower limb prosthesis[J]. IEEE Access, 2021, 9: 85956-85977. |
| [3] |
魏艳琴, 曹学军, 杨平, 等. 下肢截肢者穿戴假肢行走能力的评价[J]. 中国康复理论与实践, 2016, 22(7): 855-859.
doi: 10.3969/j.issn.1006-9771.2016.07.028 |
| WEI Y Q, CAO X J, YANG P, et al. Evaluation for walking ability of lower limb amputees with prostheses: a literature analysis[J]. Chin J Rehabil Theory Pract, 2016, 22(7): 855-859. | |
| [4] |
顾洪, 李伟达, 李娟. 智能膝关节假肢研究现状及发展趋势[J]. 中国康复理论与实践, 2016, 22(9): 1080-1085.
doi: 10.3969/j.issn.1006-9771.2016.09.021 |
| GU H, LI W D, LI J. State-of-the-art and development of intelligent knee prosthesis (review)[J]. Chin J Rehabil Theory Pract, 2016, 22(9): 1080-1085. | |
| [5] |
张意彬, 吕杰, 喻洪流. 基于模糊逻辑算法的智能膝关节假肢步态相位识别[J]. 中国康复理论与实践, 2023, 29(8): 896-902.
doi: 10.3969/j.issn.1006-9771.2023.08.005 |
| ZHANG Y B, LÜ J, YU H L. Gait phase recognition in intelligent above-knee prosthesis based on fuzzy logic algorithm[J]. Chin J Rehabil Theory Pract, 2023, 29(8): 896-902. | |
| [6] | 喻洪流. 康复机器人:未来十大远景展望[J]. 中国康复医学杂志, 2020, 35(8): 900-902. |
| [7] | 刘作军, 许长寿, 陈玲玲, 等. 智能假肢膝关节的研发要点及其研究进展综述[J]. 包装工程, 2021, 42(10): 54-63. |
| LIU Z J, XU C S, CHEN L L, et al. Key point and progress of intelligent prosthesis knee joint research[J]. Packaging Eng, 2021, 42(10): 54-63. | |
| [8] | 王蕾, 王辉, 黄品高, 等. 下肢截肢者行走意图识别方法研究进展[J]. 自动化学报, 2018, 44(8): 1370-1380. |
| WANG L, WANG H, HUANG P G, et al. Progress and perspective of recognition methods for walking intention of lower-limb amputees[J]. Acta Automatica Sinica, 2018, 44(8): 1370-1380. | |
| [9] | 孙为双, 路知远, 公维军, 等. 表面肌电信号在脑卒中手功能康复机器人中的研究进展[J]. 中国康复医学杂志, 2025, 40(5): 790-794. |
| [10] | 张尧. 智能动力膝关节假肢的人体运动意图识别技术研究[D]. 长春: 吉林大学, 2024. |
| ZHANG Y. Research on human locomotion intent recognition technology for intelligent powered knee prosthesis[D]. Changchun: Jilin University, 2024. | |
| [11] | WANG E, CHEN X, LI Y, et al. Lower limb motion intent recognition based on sensor fusion and fuzzy multitask learning[J]. IEEE Trans Fuzzy Syst, 2024, 32(5): 2903-2914. |
| [12] | MA X, LIU Y, ZHANG X, et al. Real-time continuous locomotion mode recognition and transition prediction for human with lower limb exoskeleton[J]. IEEE J Biomed Health Inform, 2025, 29(2): 1074-1086. |
| [13] | CARVALHO S P, FIGUEIREDO J, CERQUEIRA J J, et al. Locomotion mode prediction in real-life walking with and without ankle-foot exoskeleton assistance[J]. Appl Intell, 2025, 55: 546. |
| [14] | 黄品高. 智能下肢假肢运动意图的感测与识别关键技术研究[D]. 深圳: 中国科学院大学(中国科学院深圳先进技术研究院), 2020. |
| HUANG P G. Study on the key technologies of motion intention sensing and recognition of intelligent lower limb prostheses[D]. Shenzhen: The University of Chinese Academy of Sciences (Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences), 2020. | |
| [15] | 陈辉, 任志刚, 冯祖仁, 等. 基于IMU和运动学的四足机器人对角支撑状态估计算法[J]. 控制与决策, 2024, 39(9): 2894-2902. |
| CHEN H, REN Z G, FENG Z R, et al. State estimation for diagonal support of quadruped robot based on IMU and kinematics[J]. Control Decision, 2024, 39(9): 2894-2902. | |
| [16] |
杨平, 陈浩源, 高睿馨, 等. 基于低成本惯性测量单元和力敏电阻的足部三维运动数据建模[J]. 中国康复理论与实践, 2024, 30(10): 1224-1231.
doi: 10.3969/j.issn.1006-9771.2024.10.013 |
| YANG P, CHEN H Y, GAO R X, et al. Three-dimensional modeling of foot motion based on low-cost inertial measurement unit and force sensing resistor[J]. Chin J Rehabil Theory Pract, 2024, 30(10): 1224-1231. | |
| [17] | SU B Y, WANG J, LIU S Q, et al. A CNN-based method for intent recognition using inertial measurement units and intelligent lower limb prosthesis[J]. IEEE Trans Neural Syst Rehabil Eng, 2019, 27(5): 1032-1042. |
| [18] | 盛敏, 夏安琦, 王可林, 等. 基于几何与物理特征融合的智能下肢假肢运动意图识别[J]. 控制与决策, 2022, 37(4): 953-961. |
| SHENG M, XIA A Q, WANG K L, et al. Movement intention recognition of intelligent lower limb prosthesis based on the fusion of geometric and physical features[J]. Control Decision, 2022, 37(4): 953-961. | |
| [19] | KIM H, LEE D, MALDONADO-CONTRERAS J Y, et al. Mode-unified intent estimation of a robotic prosthesis using deep-learning[J]. IEEE Robot Autom Lett, 2025, 10(4): 3206-3213. |
| [20] | 唐易, 陈奕希, 喻洪流, 等. 一种面向下肢假肢的运动意图识别方法及验证[J]. 信息与控制, 2023, 52(5): 598-606. |
| TANG Y, CHEN Y X, YU H L, et al. Research and verification of a motion intention recognition method for lower limb prosthesis[J]. Inform Control, 2023, 52(5): 598-606. | |
| [21] | CHEN Z, ZHANG T. Evaluation of basic sports actions for students based on DTW posture matching algorithm[J]. System Soft Comput, 2025, 7: 200196. |
| [22] | HAQUE M R, ISLAM M R, SAZONOV E, et al. Swing-phase detection of locomotive mode transitions for smooth multi-functional robotic lower-limb prosthesis control[J]. Front Robot AI, 2024, 11: 1267072. |
| [23] | ZHENG E, WAN J, GAO S, et al. Adaptive locomotion transition recognition with wearable sensors for lower limb robotic prosthesis[J]. IEEE ASME Trans Mechatron, 2024, 29(1): 279-289. |
| [24] | 王启宁, 郑恩昊, 陈保君, 等. 面向人机融合的智能动力下肢假肢研究现状与挑战[J]. 自动化学报, 2016, 42(12): 1780-1793. |
| WANG Q N, ZHENG E H, CHEN B J, et al. Recent progress and challenges of robotic lower-limb prostheses for human-robot integration[J]. Acta Automatica Sinica, 2016, 42(12): 1780-1793. | |
| [25] | 盛敏, 刘双庆, 王婕, 等. 基于GMM-HMM模型的智能下肢假肢运动意图识别[J]. 仪器仪表学报, 2019, 40(5): 169-178. |
| SHENG M, LIU S Q, WANG J, et al. Motion intent recognition of intelligent lower limb prosthesis based on GMM-HMM[J]. Chin J Sci Instrum, 2019, 40(5): 169-178. | |
| [26] | 邵企能, 王禾, 胡天羿, 等. 年龄与性别对人体步态生物力学特征的影响[J]. 应用力学学报, 2022, 39(6): 1193-1202. |
| SHAO Q N, WANG H, HU T Y, et al. Effects of age and gender on biomechanical characteristics of human gait[J]. Chin J Appl Mechan, 2022, 39(6): 1193-1202. | |
| [27] | WINTER D A. Biomechanics of normal and pathological gait[J]. J Mot Behav, 1989, 21(4): 337-355. |
| [28] | BERNDT D J, CLIFFORD J. Using dynamic time warping to find patterns in time series[C]. Seattle:Proceedings of the 3rd International Conference on Knowledge Discovery and Data Mining, 1994. |
| [29] |
苏本跃, 张利, 何清旋, 等. 基于小波特征匹配的短时人体行为识别[J]. 系统仿真学报, 2023, 35(1): 158-168.
doi: 10.16182/j.issn1004731x.joss.22-0176 |
| SU B Y, ZHANG L, HE Q X, et al. Short-time human activity recognition based on wavelet features matching[J]. J System Simul, 2023, 35(1): 158-168. | |
| [30] | CHANG C C, LIN C J. LIBSVM: a library for support vector machines[J]. ACM Trans Intell Syst Technol, 2011, 2(3): 1-27. |
| [31] | 周绍磊, 廖剑, 史贤俊. 基于Fisher准则和最大熵原理的SVM核参数选择方法[J]. 控制与决策, 2014, 29(11): 1991-1996. |
| ZHOU S L, LIAO J, SHI X J. SVM parameters selection method based on Fisher criterion and maximum entropy principle[J]. Control Decision, 2014, 29(11): 1991-1996. | |
| [32] | AU S K, WEBER J, HERR H. Powered ankle-foot prosthesis improves walking metabolic economy[J]. IEEE Trans Robot, 2009, 25(1): 51-66. |
| [33] | 苏本跃, 王婕, 刘双庆, 等. 惯性动捕数据驱动下的智能下肢假肢运动意图识别方法[J]. 自动化学报, 2020, 46(7): 1517-1530. |
| SU B Y, WANG J, LIU S Q, et al. An improved motion intent recognition method for intelligent lower limb prosthesis driven by inertial motion capture data[J]. Acta Automatica Sinica, 2020, 46(7): 1517-1530. | |
| [34] | 夏安琦. 基于融合特征及分层策略的下肢假肢运动意图识别[D]. 安庆: 安庆师范大学, 2021. |
| XIA A Q. Motion intention recognition of lower limb prosthesis based on fusion feature and stratification strategy[D]. Anqing: Anqing Normal University, 2021. | |
| [35] | WANG N, AMBIKAIRAJAH E, LOVELL N H, et al. Accelerometry based classification of walking patterns using time-frequency analysis[C]. Lyon:2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2007. |
| [36] | HE H, TAN Y, ZHANG W. A wavelet tensor fuzzy clustering scheme for multi-sensor human activity recognition[J]. Eng Appl Artif Intell, 2018, 70: 109-122. |
| [37] | 苏本跃, 宗文杰, 刘文瑶, 等. 基于足底动力相数据和小波变换自适应分解的下肢意图识别方法[J]. 控制与决策, 2025, 40(10): 3005-3018. |
| SU B Y, ZONG W J, LIU W Y, et al. Lower limb prosthesis intention recognition method based on powered plantarflexion phase data and wavelet transform adaptive decomposition[J]. Control Decision, 2025, 40(10): 3005-3018. | |
| [38] | SHENG M, WANG W J, TONG T T, et al. Motion intent recognition in intelligent lower limb prosthesis using one-dimensional dual-tree complex wavelet transforms[J]. Comp Intell Neurosci, 2021, 2021: 563173. |
| [39] | LIU Y, AN H L, MA H X, et al. Novel feature extraction and locomotion mode classification using intelligent lower-limb prosthesis[J]. Machines, 2023, 11(2): 235. |
| [40] | ZHANG P, ZHANG J, ELSABBAGH A. Lower limb motion intention recognition based on sEMG fusion features[J]. IEEE Sens J, 2022, 22(7): 7005-7014. |
| [1] | YANG Ping, CHEN Haoyuan, GAO Ruixin, WANG Xinping, Philip ROWE. Three-dimensional modeling of foot motion based on low-cost inertial measurement unit and force sensing resistor [J]. Chinese Journal of Rehabilitation Theory and Practice, 2024, 30(10): 1224-1231. |
| [2] | Meng-lin CAO,Yu-hao CHEN,Jue WANG,Tian LIU. Advance in Human Motion Intention Recognition Based on Surface Electromyography (review) [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2021, 27(5): 595-603. |
| [3] | YANG Bo;FU Cheng-long. Inertial Measurement Unit and Fall Risk Assessment in the Elderly (review) [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2015, 21(07): 780-784. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||