


《Chinese Journal of Rehabilitation Theory and Practice》 ›› 2021, Vol. 27 ›› Issue (6): 627-636.doi: 10.3969/j.issn.1006-9771.2021.00.002
Previous Articles Next Articles
Sheng LU1,2,Bing-shan HU1,2( ),Ke CHENG1,2,Hong-liu YU1,2,Wei NI1,2
),Ke CHENG1,2,Hong-liu YU1,2,Wei NI1,2
Received:2020-11-20
Revised:2020-11-30
Published:2021-06-25
Online:2021-06-21
Contact:
Bing-shan HU
E-mail:hubingshan@usst.edu.cn
Supported by:CLC Number:
Sheng LU,Bing-shan HU,Ke CHENG,Hong-liu YU,Wei NI. Advance in Flexible Variable Stiffness Actuator of Rehabilitation Robot (review)[J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2021, 27(6): 627-636.
"
"
"
"

"
"

"

"
"
"
"
"
"
"

"

"
"
"
"

"
"
"

"


"

"
| 1 | GOPURA R A R C, BANDARA D S V, KIGUCHI K, et al. Developments in hardware systems of active upper-limb exoskeleton robots: a review [J]. Robot Auton Syst, 2016, 75: 203-220. |
| 2 | MARCHAL-CRESPO L, REINKENSMEYER D J. Review of control strategies for robotic movement training after neurologic injury [J]. J NeuroEng Rehabil, 2009, 6(1): 20. |
| 3 | CESTARI M, SANZ-MERODIO D, AREVALO J C, et al. An adjustable compliant joint for lower-limb exoskeletons [J]. IEEE-ASME T Mech, 2015, 20(2): 889-898. |
| 4 | 徐国政,陈雯,高翔,等. 基于阻抗辨识和混杂控制的机器人辅助抗阻训练方法[J]. 机械工程学报, 2016, 52(15): 8-14. |
| XU G Z, CHEN W, GAO X, et al. Robot-aided resistance training method based on impedance identification and hybrid control [J]. Chin J Mech Eng, 2016, 52(15): 8-14. | |
| 5 | WANG D, YU H. Development of the control system of a voice-operated wheelchair with multi-posture characteristics [C]. Wuhan, China: Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), IEEE, 2017: 151-155. |
| 6 | NICOL A C. Basic biomechanics of the musculoskeletal system [J]. J Biomech, 2002, 35(6): 872. |
| 7 | BICCHI A, TONIETTI G, BAVARO M, et al. Variable stiffness actuators for fast and safe motion control [J]. STAR, 2005, 15:527-536. |
| 8 | TONIETTI G, SCHIAVI R, BICCHI A. Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction [C]. Barcelona, Spain: International Conference on Robotics and Automation, IEEE, 2005: 526-531. |
| 9 | 王颜,房立金. 机械式仿骨骼肌变刚度机构原理及设计[J]. 机器人, 2015, 37(4): 506-512. |
| WANG Y, FANG L J. Principle and design of mechanically musculoskeletal variable-stiffness mechanism [J].Robot, 2015,37(4): 506-512. | |
| 10 | RICHTER C, JENTZSCH S, HOSTETTLER R, et al. Scalability in neural control of musculoskeletal robots [J]. IEEE Robot Autom Mag, 2016: 128-137. |
| 11 | GREBENSTEIN M, ALBU-SCHAFFER A, BAHLS T, et al. The DLR hand arm system [C]. Shanghai, China: IEEE International Conference on IEEE, 2011: 3175-3182. |
| 12 | CHENG P J, HUANG H P. Modeling and control of the CCEA robotic arm [C]. Karon Beach, Phuket, Thailand: International Conference on Robotics and Biomimetics, IEEE, 2011: 1171-1176. |
| 13 | LI Z, BAI S. Design and modelling of a compact variable stiffness mechanism for wearable elbow exoskeletons [C]. Delft, Netherlands: International Conference on Control, Mechatronics and Automation, IEEE, 2019: 342-346. |
| 14 | JAFARI A, TSAGARAKIS N G, SARDELLITTI I, et al. A new actuator with adjustable stiffness based on a variable ratio lever mechanism [J]. IEEE-ASME T Mech, 2014, 19(1): 55-63. |
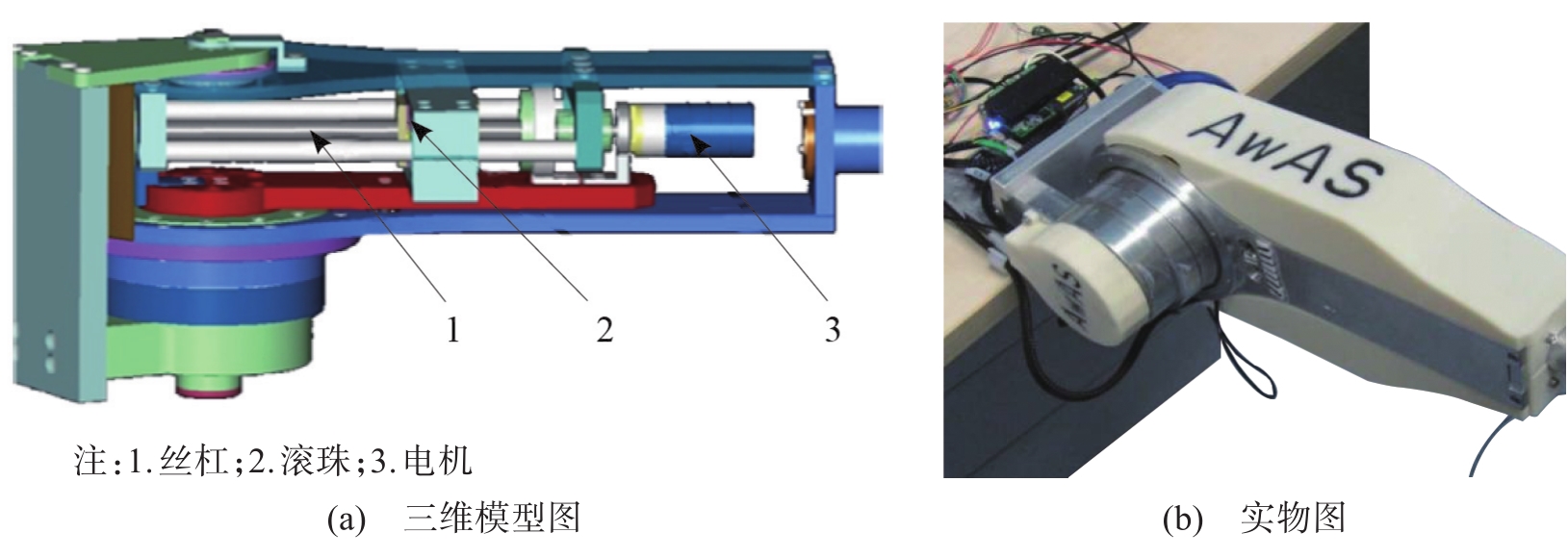
| 15 | JAFARI A, TSAGARAKIS N G, VANDERBORGHT B, et al. A novel actuator with adjustable stiffness (AwAS) [C]. Taipei, China: International Conference on Intelligent Robots and Systems, IEEE,2010: 4201-4206. |
| 16 | VISSER L, CARLONI R, STRAMIGIOLI S. Energy-efficient variable stiffness actuators [J]. IEEE T Robot, 2011, 27(5): 865-875. |
| 17 | SUN J, GUO Z, ZHANG Y, et al. A novel design of serial variable stiffness actuator (SVSA) based on an archimedean spiral relocation mechanism [J]. IEEE-ASME T Mech, 2018, 23(5): 2121-2131. |
| 18 | WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ: energy based design of a variable stiffness joint [C]. Shanghai, China: International Conference on Robotics and Automation. IEEE, 2011: 5082-5089. |
| 19 | ZHU H, THOMAS U. A new design of a variable stiffness joint[C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 223-228. |
| 20 | YAN J. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators [J]. J Mech Eng En, 2018, 54(15): 1-14. |
| 21 | GIANNACCINI M E, XIANG C, ATYABI A, et al. Novel design of a soft lightweight pneumatic continuum robot arm with decoupled variable stiffness and positioning [J]. Soft Robot, 2017, 5(1): 54-70. |
| 22 | LI Y, CHEN Y, YANG Y, et al. Passive particle jamming and its stiffening of soft robotic grippers [J]. IEEE T Robot, 2017, 33(2): 446-455. |
| 23 | KIM Y, CHENG S, KIM S, et al. A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery [J]. IEEE T Robot, 2013, 29(4): 1031-1042. |
| 24 | CHOI W H, KIM S, LEE D, et al. Soft, multi-DOF, variable stiffness mechanism using layer jamming for wearable robots [J]. IEEE Roboti Autom Let, 2019, 4(3): 2539-2546. |
| 25 | WANG T, ZHANG J, LI Y, et al. Electrostatic layer jamming variable stiffness for softrobotics [J]. IEEE-ASME T Mech, 2019, 24(2): 424-433. |
| 26 | HEYA A, NAKATA Y, HIRATA K, et al. A magnetic lead screw with variable stiffness mechanism [C]. Neuchatel, Switzerland: International Symposium on Linear Drives for Industry Applications (LDIA), IEEE, 2019: 1-4. |
| 27 | LIAO T, TSE Z T H, REN H. Variable stiffness actuators embedded with soft-bodied polycaprolactone and shape memory alloy wires [C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 108-113. |
| 28 | LIU Y, GUO S, ZHANG S, et al. Modeling and analysis of a variable stiffness actuator for a safe home-based exoskeleton [C]. Changchun, China: International Conference on Mechatronics and Automation (ICMA), IEEE, 2018: 252-262. |
| 29 | SONG Z, HU X, DAI J. A Novel Design of Nonlinear Stiffness Actuator for Neurorehabilitation Robots [M]. Springer, 2018: 317-320. |
| 30 | Yu L Q, Wang K, Chen T N. A portable variable stiffness unpowered aided exoskeleton design [M]//Long S, Dhillon B. Man-Machine-Environment System Engineering. Springer, 2020: 357-367. |
| 31 | LEMERLE S, GRIOLI G, BICCHI A, et al. A Variable Stiffness Elbow Joint for Upper Limb Prosthesis [C]. Macau, China: International Conference on Intelligent Robots and Systems (IROS), IEEE, 2019: 7327-7334. |
| 32 | GLANZER E M, ADAMCZYK P G. Design and validation of a semi-active variable stiffness foot prosthesis [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018, 26(12): 2351-2359. |
| 33 | OSADA M, ITO N, NAKANISHI Y, et al. Realization of flexible motion by musculoskeletal humanoid "Kojiro" with add-on nonlinear spring units [C]. Nashville, TN, USA: International Conference on Humanoid Robots, IEEE, 2010: 174-179. |
| 34 | FURNÉMONT R, MATHIJSSEN G, HOEVEN T V D, et al. Torsion MACCEPA: a novel compact compliant actuator designed around the drive axis [C]. Seattle, WA, USA: International Conference on Robotics and Automation (ICRA), IEEE, 2015: 232-237. |
| 35 | SAVIN S, GOLOUSOV S, KHUSAINOV R, et al. Control system design for two link robot arm with MACCEPA2.0 variable stiffness actuators [C]. Hong Kong, China: International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019: 624-628. |
| [1] | SHAO Weiting, LEI Jianghua. Effect of response interruption and redirection as a behavioral intervention on vocal stereotypy in children with autism spectrum disorder: a scoping review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2024, 30(1): 10-20. |
| [2] | WANG Hangyu, GE Keke, FAN Yonghong, DU Lilu, ZOU Min, FENG Lei. Effect of active music therapy on cognitive function for older adults with cognitive impairment: a systematic review based on ICD-11 and ICF [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2024, 30(1): 36-43. |
| [3] | WEN Jianing, JIN Qiuyan, ZHANG Qi, LI Jie, SI Qi. Effect of cognitively engaging physical activity on developing executive function of children and adolescents: a systematic review based on ICF [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2024, 30(1): 44-53. |
| [4] | GE Keke, FAN Yonghong, WANG Hangyu, DU Lilu, LI Changjiang, ZOU Min. Health benefit of mindfulness intervention for older adults with insomnia disorders: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2024, 30(1): 54-60. |
| [5] | ZHANG Jingya, ZOU Min, SUN Hongwei, SUN Changlong, ZHU Juntong. Effect of psychological intervention on anxiety or depression in children and adolescents with hearing impairment: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1004-1011. |
| [6] | WANG Junyu, YANG Yong, YUAN Xun, XIE Ting, ZHUANG Jie. Effect of high-intensity interval training on executive function for healthy children and adolescents: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1012-1020. |
| [7] | WEI Xiaowei, YANG Jian, WEI Chunyan. Psychological and behavioral benefits of adapted yoga exercise for children with autism spectrum disorder in special education schools: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1021-1028. |
| [8] | YANG Yaru, YANG Jian. School-based physical activity-related health services and their health benefits within the World Health Organization health-promoting school framework: a systematic review of systematic reviews [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1040-1047. |
| [9] | WANG He, HAN Liang, KAN Mengfan, YU Shaohong. Efficacy of electrical stimulation on shoulder-hand syndrome after stroke: a systematic review and meta-analysis [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1048-1056. |
| [10] | SHI Jiawei, LI Lingyu, YANG Haojie, WANG Qinlu, ZOU Haiou. Effect of preoperative prerehabilitation training on total knee arthroplasty: a systematic review of systematic reviews [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(9): 1057-1064. |
| [11] | JIANG Changhao, HUANG Chen, GAO Xiaoyan, DAI Yuanfu, ZHAO Guoming. Effect of neurofeedback training on cognitive function in the elderly: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(8): 903-909. |
| [12] | WEI Xiaowei, YANG Jian, WEI Chunyan, HE Qiling. Adapted physical education programs for psychomotor development in school settings for children with intellectual and developmental disabilities: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(8): 910-918. |
| [13] | ZHANG Yuan, YANG Jian. School health services and effectiveness based on World Health Organization health-promoting school framework: a scoping review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(7): 791-799. |
| [14] | WANG Shaopu, CHEN Gang. Psychological-behavioral health services and its outcome based on World Health Organization health-promoting school framework: a systematic review of systematic reviews [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(7): 800-807. |
| [15] | JIANG Changhao, GAO Xiaoyan. Effect of acute physical activity on cognitive function in children: a systematic review [J]. 《Chinese Journal of Rehabilitation Theory and Practice》, 2023, 29(6): 667-672. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||